一個 CORDIC (代表 **CO**ordinate **R**otation **DI**gital **C**omputer) 電路用於計算一些常見的數學函式,例如三角函式、雙曲函式、對數函式和指數函式。
CORDIC 只使用加法器和位移來計算結果,因此它可以使用相對基本的硬體實現。
像冪級數或查表法通常需要執行乘法。如果硬體乘法器不可用,CORDIC 通常更快,但如果可以使用乘法器,其他方法可能更快。
CORDIC 可以用多種方法實現,包括單級迭代方法,與乘法器電路相比,它需要很少的門。此外,CORDIC 可以使用完全相同的硬體計算許多函式,因此它們非常適合那些將降低成本(例如透過減少 FPGA 中的門數)優先於速度的應用。這種優先順序的一個例子是袖珍計算器,其中 CORDIC 被廣泛使用。
CORDIC 最初是由 J.E. Volder 於 1959 年在康維爾航空電子部門發明的,它被設計用於 B-58 轟炸機的導航計算機,以取代模擬分解器,一種計算三角函式的裝置(圓 CORDIC)。
1971 年,惠普的 J.S. Walther 將該方法擴充套件到計算雙曲函式、自然對數、自然指數、乘法、除法和平方根(線性 CORDIC 和雙曲 CORDIC)。
2019 年,基於雙曲 CORDIC,羅元勇等人進一步提出了一種廣義雙曲 CORDIC (GH CORDIC) 來直接計算具有任意固定基數的對數和指數。理論上,雙曲 CORDIC 是 GH CORDIC 的特例。
考慮以下向量的旋轉

|

|
- 從 (1, 0) 開始
- 旋轉 θ
- 我們得到 (cosθ, sinθ)
|
- 從 (1, y) 開始
- 旋轉直到 y = 0
- 旋轉是 tan−1y
|
如果我們有一個計算效率高的向量旋轉方法,我們可以直接計算正弦、餘弦和反正切函式。但是,任意角度的旋轉並不容易(你必須知道正弦和餘弦,而這正是我們所沒有的)。我們使用兩種方法來簡化它
- 我們不執行旋轉,而是執行“偽旋轉”,它們更容易計算。
- 用一組特殊角度 αi 的和來構造所需的角度 θ

下圖顯示了長度為 Ri 的向量繞原點旋轉 ai 角的旋轉和偽旋轉
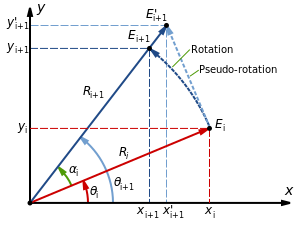
繞原點旋轉產生以下座標



回想一下身份  .
.


我們的策略是消除因子  ,並設法消除乘以
,並設法消除乘以  。偽旋轉生成一個與旋轉向量具有相同角度但長度不同的向量。事實上,偽旋轉將長度更改為
。偽旋轉生成一個與旋轉向量具有相同角度但長度不同的向量。事實上,偽旋轉將長度更改為

因此,我們現在有以下偽旋轉後的座標



偽旋轉成功地消除了我們的長度因子,而長度因子本來需要一個代價高昂的除法運算。然而,向量將在n個偽旋轉序列中增長K倍

然後,經過n個偽旋轉後的座標為



 前三次偽旋轉。注意我們如何收斂到正確的角度,θ
前三次偽旋轉。注意我們如何收斂到正確的角度,θ
如果角度總是相同的集合,那麼 K 是固定的,可以在以後考慮。我們根據兩個標準選擇這些角度
- 我們還必須選擇角度,以便任何角度都可以透過所有角度的總和來構建,並帶有適當的符號。
- 我們將所有 設定為 2 的冪,以便乘法可以透過二進位制數的簡單邏輯移位來執行。
正切函式在區間 [0, π/2] 上具有單調遞增的梯度,因此給定角度的正切始終小於該角度的一半正切的兩倍。這意味著如果我們使角度  ,我們可以滿足這兩個標準。請注意,正切函式是奇函式,這意味著要以另一種方式進行偽旋轉,您只需減去而不是新增角度的正切。
,我們可以滿足這兩個標準。請注意,正切函式是奇函式,這意味著要以另一種方式進行偽旋轉,您只需減去而不是新增角度的正切。
| i |
αi = tan−1 (2−i) |
| 度 |
弧度 |
| 0 |
45.00 |
0.7854
|
| 1 |
26.57 |
0.4636
|
| 2 |
14.04 |
0.2450
|
| 3 |
7.13 |
0.1244
|
| 4 |
3.58 |
0.0624
|
| 5 |
1.79 |
0.0312
|
| 6 |
0.90 |
0.0160
|
| 7 |
0.45 |
0.0080
|
| 8 |
0.22 |
0.0040
|
| 9 |
0.11 |
0.0020
|
在過程的步驟 i 中,我們以  進行偽旋轉,其中
進行偽旋轉,其中  是旋轉的方向(或符號),這將在每一步都選擇,以迫使角度收斂到所需的最終旋轉。例如,考慮 28° 的旋轉
是旋轉的方向(或符號),這將在每一步都選擇,以迫使角度收斂到所需的最終旋轉。例如,考慮 28° 的旋轉


我們採取的步驟越多,我們就可以透過連續旋轉來進行更好的近似。因此,我們有以下迭代座標計算



為了達到k位的精度,需要進行k次迭代,因為 ,隨著i的增加而收斂。
,隨著i的增加而收斂。

CORDICs可以用來計算許多函式。一個CORDIC有三個輸入,x0, y0和z0。根據CORDIC的輸入,可以在輸出xn, yn和zn產生不同的結果。
為了使zn收斂到0,選擇 .
.
如果我們從x0 = 1/K和y0=0開始,在過程結束時,我們會發現xn=cos z0和yn=sin z0。
收斂域是 ,因為99.7°是列表中所有角度的總和。
,因為99.7°是列表中所有角度的總和。
為了使yn收斂到0,選擇 .
.
如果我們從x0 = 1和z0 = 0開始,我們會發現zn=tan−1y0

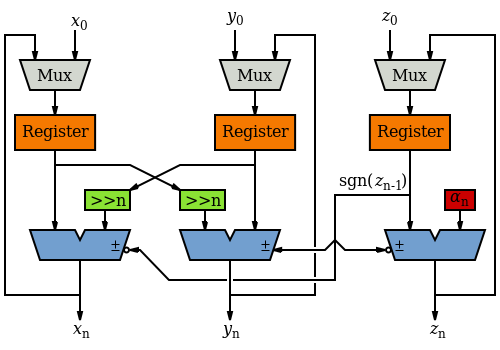
如果不需要高速,可以使用一個加法器和一個移位器實現。
透過引入因子μ,我們也可以滿足線性函式和雙曲函式的需求。



|

|

|

|

|

|

|

|

|

|

|

|
除了上述函式外,還可以透過組合先前計算結果來生成許多其他函式。

|

|

|

|

|

|

|

|
|
|

|
|
|

|
- Volder, J.E. (1959), "CORDIC 三角函式計算技術" (PDF), IRE 電子計算機學報, 8 (3): 330–334, 檢索於 2009-06-02
- Walther, J.S. (1971), "基本函式的統一演算法" (w), 1971 年 5 月 18 日至 20 日春季聯合計算機大會論文集: 379–385, 檢索於 2009-06-02
- 羅元勇,王雨軒,哈亞軍,王忠鋒,陳思遠,潘洪兵 (2019),"廣義雙曲 CORDIC 及其任意固定基數的對數和指數計算",IEEE 超大規模積體電路 (VLSI) 系統彙刊,27 (9): 2156–2169,doi:10.1109/TVLSI.2019.2919557 CS1 maint: multiple names: authors list (link)
- Vladimir Baykov,基於逐位 (CORDIC) 技術的基本函式評估問題,博士論文,列寧格勒國立電氣工程大學,1972 年
- Schmid, Hermann,十進位制計算。紐約,Wiley,1974 年
- V.D.Baykov,V.B.Smolov,計算機中基本函式的硬體實現,列寧格勒國立大學,1975 年,96 頁。*全文
- Senzig, Don,計算器演算法,IEEE Compcon 閱讀摘要,IEEE 目錄號 75 CH 0920-9C,第 139-141 頁,IEEE,1975 年。
- V.D.Baykov,S.A.Seljutin,微型計算器中的基本函式評估,莫斯科,Radio & svjaz,1982 年,64 頁。
- Vladimir D.Baykov,Vladimir B.Smolov,專用處理器:迭代演算法和結構,莫斯科,Radio & svjaz,1985 年,288 頁
- M. E. Frerking,通訊系統中的數字訊號處理,1994 年
- Vitit Kantabutra,關於計算指數和三角函式的硬體,IEEE 計算機彙刊 45 (3),328-339 (1996)
- Andraka, Ray,基於 FPGA 計算機的 CORDIC 演算法調查
- Henry Briggs,對數算術。倫敦,1624 年,對開本
- CORDIC 文獻網站,王少雲,2011 年 7 月
- 演算法的秘密,Jacques Laporte,巴黎 1981 年
- 逐位方法,Jacques Laporte,巴黎 2006 年
- Ayan Banerjee,基於 CORDIC 的生物醫學訊號處理 FFT 處理器的 FPGA 實現,卡拉格浦爾,2001 年
- CORDIC 架構:綜述,B. Lakshmi 和 A. S. Dhar,期刊:VLSI 設計,2010 年 1 月
- 在數字下變頻器中實現 CORDIC 演算法,C. Cockrum,2008 年秋季
- Parhami, B. (1999),計算機算術:演算法和硬體設計












.svg)
.svg)







