 具有充電部分、放電部分和兩個開關的完整電路
具有充電部分、放電部分和兩個開關的完整電路
 充電電路(sw1閉合,sw2開啟)
充電電路(sw1閉合,sw2開啟)
 放電電路(sw1開啟,sw閉合)
放電電路(sw1開啟,sw閉合)
電源電壓可以是直流電。在這種情況下,初始電容器電壓將為 Vs,電壓的導數將為零。
電源電壓可以是交流電,在這種情況下,開關切換的確切時間或更精確的相位角將決定 Vs 和電壓值的導數。
初始電感器電流將為零,導數將為零。
經過很長時間後,將不再有任何活動。穩態特解將為零。
電流將貫穿始終保持一致。目標應該是找到電流的表示式。然而,任何電壓也可以被找到,然後是電流。無關緊要。
總之,放電電路中將沒有初始電流,電容器兩端將有電壓。電感器將在 t=0+ 時表現得像開路,因此整個電壓將出現在電感器兩端,並立即(在 t=0- 和 t=0+ 之間)引起電感器電流導數的變化。
一階電路電流方程為

然而,這是一個二階電路(同時包含電容器和電感器),因此

複頻率 s 替換了 tau。時間常數的概念消失了。s 的直觀解釋存在,但更復雜。記住

回到複頻率域以找到時間常數。從迴路方程開始

將 Vr 和 VL 的端子方程代入,但不要代入 Vc,因為想要避免積分

從電容器的端子關係可知

因此代入後,得到 Vc 的微分方程

現在可以看到二階了。
零點就像時間常數,但可能存在多個零點。它們可能對電路的影響各不相同。
需要找到 Vc。特解(穩態)將為零。(零點的名稱來源)。
齊次解將具有以下形式

代入微分方程

除以 Aest 得到


該方程的零點為

根據您對二次方程的經驗,您知道1,2有三種類型的配對
| 配對型別 |
Vc的修正方程 |
解釋 |
| 實數,不相等 |
 |
過阻尼 |
| 相等 |
 |
臨界阻尼 |
| 複數 |
 ) ) |
欠阻尼
|
修正方程(猜測)來自數學證明,一些課程從拉普拉斯變換推匯出這些方程。只需記住這張表。
有兩個儲能元件,每個元件有兩個初始條件,因此可能有四個方程和四個常數。A1和A2是其中的兩個。
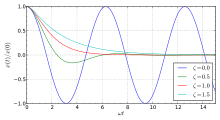 無阻尼(藍色)、欠阻尼(綠色)、臨界阻尼(紅色)和過阻尼(青色)情況
無阻尼(藍色)、欠阻尼(綠色)、臨界阻尼(紅色)和過阻尼(青色)情況
要理解阻尼,想象一輛汽車駛過路邊石。無阻尼意味著汽車會永遠上下彈跳。欠阻尼是指當減震器開始漏油時發生的情況(汽車會上下彈跳一段時間……就像乘船一樣)。臨界阻尼是為什麼人們討厭跑車(會震動他們的屁股)。汽車的過阻尼響應會給駕駛員反饋。上面這樣的電路已被用來模擬減震器。這些電路被稱為模擬計算機.
 R和L對共振的影響
R和L對共振的影響
以上三種中最有趣的是欠阻尼。會發生類似共振的現象。
衛星會根據哪一面朝向太陽或2.7開爾文的太空而膨脹和收縮。重複的膨脹和收縮會產生振盪,需要透過一個電機來抑制,該電機會旋轉一個重量來抑制振動。否則,任何可以擺動的東西都會越來越劇烈地擺動,直到部件開始脫落。(地球上的汽車也不例外)。
大多數控制電路輸入都是不平衡的。輸出模擬所需的行為。校正(反饋控制)電路(此處未討論)會介入以確保實際行為與所需行為匹配。最常的做法是設計一個臨界阻尼電路,而不是僅僅預測將要發生的事情。
當s1和s2是純虛數時,會發生共振(或接近共振)。
因此

有趣的是根號項。它決定了二階響應的性質。
當二次方程解的實部為零時,就會發生純共振,這隻會發生在R<<L時。
 晶體用一個電容並聯一個串聯RLC網路來建模
晶體用一個電容並聯一個串聯RLC網路來建模
根號項的內容不必為零,只要實部為零,就可以是過阻尼的


j抵消了,我們已經假設了R<<L,所以

稱為阻尼頻率、振鈴頻率或無阻尼頻率。
當R<<L時,它會變成共振頻率

機械工程師試圖預測給定結構和材料的 ω。它可以是建築物或電機支架。數學證明了 ω 的存在。找到精確的 ω 通常需要測試。機械工程師用彈簧和阻尼器來模擬所有東西,而不是電容和電感。找到 ω 可能很困難。這就是為什麼存在整個行業的 振動臺。
結構中的彈簧和阻尼器值決定了共振的寬度或衰減程度。在設計建築物時,機械工程師希望外殼儘可能寬而平坦(衰減)。在設計陷波濾波器時,電子工程師的設計目標恰恰相反:高而窄的外殼。電子工程師稱之為 品質因數。
如今,大多數振盪器都是用 晶體 製成的。






