掃雷船上指向 水聽器 陣列的阻尼控制系統,從傳動軸到陣列的開環傳遞函式如下。

增益引數 K 可以改變。陣列的慣性矩 J 和水對陣列的粘性阻力產生的力 Kd 是已知常數,給出如下


- 該系統被安排為具有單位反饋的閉環系統。找到 K 的值,使得當輸入為單位階躍時,閉環響應的過沖量最多為 50%(大約)。您可以使用標準響應曲線。為了減少過沖量,K 應該大於還是小於該值?
- 找到系統相應的時域響應。
- 現在,系統接收恆定角速度 V 的輸入。對於上面找到的 K 的極限值,計算 V 的最大值,使得陣列最多以 5° 的誤差跟隨輸入。
首先,讓我們繪製系統的框圖。我們知道開環傳遞函式,並且存在單位反饋。因此,我們有
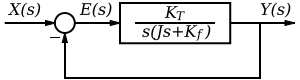
閉環增益由下式給出
 |

|
| |

|
| |

|
現在我們需要將閉環傳遞函式表示為標準二階形式。
 |
|
| |

|
現在我們可以表示自然頻率 ωn 和阻尼比 ζ



現在我們看看二階系統的標準響應曲線。
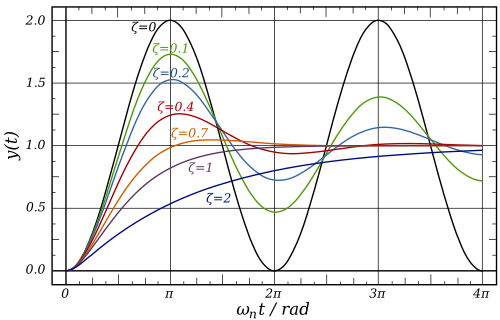
我們看到,對於 50% 的過沖,我們需要 ζ=0.2 或更大。


這是允許的最大值,因此為了減少過沖,K 應該小於此值。現在我們可以完全評估自然頻率。

二階系統的輸出由以下等式給出。
 |

|
| |

|
| |

|
我們可以繪製該系統的輸出。

跟蹤誤差訊號 E(s) 等於輸出偏離輸入。

現在,我們可以找到參考輸入 R(s) 到誤差跟蹤訊號的增益。

類似這樣的單位反饋系統的輸入到誤差跟蹤訊號的增益僅僅是  .
.
 |

|
| |

|
現在,R(s) 由斜率為V 的斜坡的拉普拉斯變換給出

我們現在使用最終值定理來尋找穩態下E(s) 的值
 |

|
| |

|
| |

|
我們需要這個值小於 





