
控制系統/反饋迴路
反饋迴路是設計控制系統時一種常見且強大的工具。反饋迴路考慮了系統輸出,使系統能夠調整其效能以滿足所需的輸出響應。
在談論控制系統時,重要的是要記住,工程師通常會得到現有的系統,例如執行器、感測器、電機和其他具有設定引數的裝置,並被要求調整這些系統的效能。在許多情況下,可能無法開啟系統(“物件”)並從內部進行調整:需要對系統外部進行修改,以迫使系統響應按預期方式運作。這是透過在系統中新增控制器、補償器和反饋結構來實現的。

這是一個基本的反饋結構。在這裡,我們使用系統的輸出值來幫助我們準備下一個輸出值。這樣,我們就可以建立能夠糾正錯誤的系統。在這裡,我們看到一個值為一的反饋迴路。我們稱之為單位反饋。
以下是一些將在以下部分中使用的相關詞彙列表
- 物件
- 術語“物件”是從化學工程中借用的,指的是主要的系統過程。物件是預先存在的系統,如果沒有控制器的幫助,它將無法滿足給定的規格。物件通常是“現有的”,並且不可更改。在上圖中,物件用 P 表示。
- 控制器
- 控制器或“補償器”是新增到物件中的一個附加系統,以控制物件的執行。系統可以有多個補償器,它們可以出現在系統的任何地方:在取樣節點之前,在求和器之後,在物件之前或之後,以及在反饋迴路中。在上圖中,我們的補償器用 C 表示。
- 求和器
- 求和器是系統圖上的一個符號(在上圖中用括號表示),它在概念上將兩個或多個輸入訊號相加,併產生一個單一的和輸出訊號。
- 取樣節點
- 取樣節點僅僅是線路上分支的代名詞。
- 前向通路
- 反饋迴路中的前向通路是求和器之後,穿過物件並走向系統輸出的通路。
- 反向通路
- 反向通路是取樣節點之後,迴圈回系統開始的通路。這也被稱為“反饋通路”。
- 單位反饋
- 當反饋通路的乘法值為 1 時。
事實證明,負反饋幾乎總是最有用的反饋型別。當我們將輸出值從輸入值(我們期望的值)中減去時,我們得到一個稱為誤差訊號的值。誤差訊號顯示了我們的輸出與我們期望的輸入相差多遠。
正反饋具有訊號傾向於自我增強並變大的特性。在正反饋系統中,來自系統的噪聲被加回到輸入,這反過來又會產生更多噪聲。作為一個正反饋系統的例子,考慮一個帶有揚聲器和麥克風的音訊放大系統。將麥克風放置在揚聲器附近會建立一個正反饋迴路,結果是聲音變得越來越響亮。由於大多數電氣系統中的噪聲都是高頻的,因此係統的聲輸出會變得尖銳。
在上一章中,我們向您展示了這張圖片

現在,我們將推匯出 I/O 關係到狀態空間方程。如果我們檢查最裡面的反饋迴路,我們可以看到前向通路有一個積分器系統,,反饋迴路具有矩陣值 A。如果我們只取這個迴路的傳遞函式,我們會得到


用因子 B 左乘,用 C 右乘,我們得到整個下半部分迴路的傳遞函式

我們可以看到上通路(D)和下通路 Tlower 相加在一起產生最終結果

現在,對於另一種方法,我們可以假設x' 是最裡面的反饋迴路的值,位於積分器之前。這是有道理的,因為x' 的積分應該是x(從圖中我們可以看到它確實是這樣的。用u 作為輸入,解出x',我們得到

這是因為來自反饋分支的值等於值 **x** 乘以反饋迴路矩陣 A,而來自求和器左側的值等於輸入 **u** 乘以矩陣 B。
如果我們用 **x** 和 **u** 來表示,我們可以看到系統輸出是 **u** 乘以前饋值 D 和 **x** 的值乘以值 C 的總和。

最後兩個方程正是我們系統的狀態空間方程。
反饋迴路傳遞函式
[edit | edit source]我們可以透過一系列方程來求解系統的輸出。


當我們解出 Y(s) 時,得到
[反饋傳遞函式]

鼓勵讀者自己使用上述方程推匯出結果。
函式 E(s) 被稱為 **誤差訊號**。誤差訊號是系統輸出 (Y(s)) 和系統輸入 (X(s)) 之間的差。請注意,誤差訊號現在是系統 G(s) 的直接輸入。X(s) 現在被稱為 **參考輸入**。負反饋迴路的目的是透過識別 X(s) 和 Y(s) 之間的較大差異並對其進行校正,使系統輸出等於系統輸入。
示例:電梯
[edit | edit source]這是一個關於參考輸入和反饋系統的簡單示例。
某棟樓裡有一部電梯,有 5 層樓。按下按鈕“1”會把你送到一樓,按下按鈕“5”會把你送到五樓,等等。為了簡單起見,一次只能按一個按鈕。
按下特定的按鈕是系統的參考輸入。按下“1”會給系統一個參考輸入 1,按下“2”會給系統一個參考輸入 2,等等。然後,電梯系統試圖使輸出(電梯的物理樓層位置)與參考輸入(在電梯中按下的按鈕)匹配。誤差訊號 e(t) 表示參考輸入 x(t) 和時間 t 時電梯的物理位置 y(t) 之間的差異。
假設電梯在一樓,並且在時間 t0 時按下了按鈕“5”。然後參考輸入成為一個階躍函式。

我們在“樓層”單位中測量。在時間 t0 時,誤差訊號為

這意味著電梯需要向上行駛 4 層。在時間 t1 時,當電梯在二樓時,誤差訊號為

這意味著電梯還有 3 層要走。最後,在時間 t4 時,當電梯到達頂層時,誤差訊號為

當誤差訊號為零時,電梯停止移動。本質上,我們可以定義三種情況。
- e(t) 為正數:在這種情況下,電梯向上移動一層,然後再次檢查。
- e(t) 為零:電梯停止。
- e(t) 為負數:電梯向下移動一層,然後再次檢查。
狀態空間反饋迴路
[edit | edit source]在狀態空間表示中,工廠通常由狀態空間方程定義。


該系統被認為是預先存在的,矩陣 A、B、C 和 D 被認為是系統內部的(因此不可更改)。此外,在典型的系統中,狀態變數要麼是虛構的(表示為虛擬變數),要麼是不可測量的。出於這些原因,我們需要向系統新增外部元件,例如增益元件或反饋元件,以提高效能。
考慮在系統輸入端新增增益矩陣 K,以及一個負反饋元件 F,該元件乘以系統輸出 y 並新增到系統的輸入訊號中。有兩種情況
- 反饋元件 F 在乘以增益矩陣 K 之前從輸入中減去。
- 反饋元件 F 在乘以增益矩陣 K 之後從輸入中減去。
在情況 1 中,反饋元件 F 在將增益乘以輸入之前新增到輸入中。如果 v 是整個系統的輸入,那麼我們可以定義 u 為

在情況 2 中,反饋元件 F 在將增益乘以輸入之後從輸入中減去。如果 v 是整個系統的輸入,那麼我們可以定義 u 為

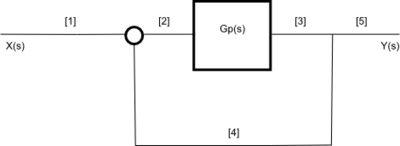
開環與閉環
[edit | edit source]
假設我們有上面所示的廣義系統。頂部部分,Gp(s) 表示所有正向路徑上的系統和控制器。底部部分,Gb(s) 表示系統中所有反饋處理元件。系統開頭的字母“K”稱為**增益**。我們將在後面的章節中更多地討論增益。我們可以定義**閉環傳遞函式**如下
[閉環傳遞函式]

如果我們“開啟”迴圈,並斷開反饋節點,我們可以定義**開環傳遞函式**,如下所示
[開環傳遞函式]

我們可以根據這個開環傳遞函式重新定義閉環傳遞函式

這些結果很重要,它們將在本書的其餘部分中使用,無需進一步解釋或推導。
控制器的放置
[edit | edit source]我們可以將附加控制器放置在許多不同的位置。
- 在系統前面,在反饋迴路之前。
- 在反饋迴路內,在正向路徑上,在系統之前。
- 在正向路徑上,在系統之後。
- 在反饋迴路內,在反向路徑上。
- 在反饋迴路之後。

每個位置都有一定的優點和缺點,希望我們有機會討論所有這些。
二階系統
[edit | edit source]二階系統的傳遞函式的通用表示式表示為

其中 和 分別是系統的阻尼比和固有頻率。


阻尼比
[edit | edit source]阻尼比由符號 定義。阻尼比讓我們瞭解瞬態響應的性質,詳細說明了系統將經歷的超調和振盪量。這與時間縮放無關。
如果
- = 零,則系統無阻尼;
- < 1,系統處於欠阻尼狀態;
- = 1,系統處於臨界阻尼狀態;
- > 1,系統處於過阻尼狀態。
用於結合自然頻率確定系統屬性。要找到zeta值,您必須先找到自然響應!
自然頻率
[edit | edit source]自然頻率,用 表示,定義為如果系統沒有阻尼,它將以什麼頻率振盪,我們將阻尼比定義為。
