訊號流圖 是另一種用來直觀表示系統的圖形方法。訊號流圖特別有用,因為它們允許使用特定的分析方法,比如 梅森增益公式。
訊號流圖通常使用曲線表示電線 和系統,而不是使用直角線和方框。每條曲線都被認為具有一個乘數值,這個值可以是恆定的增益值,也可以是整個傳遞函式。訊號從曲線的一端傳播到另一端,串聯的曲線其總乘數值相乘(就像在框圖中一樣)。
訊號流圖幫助我們識別系統中被稱為“迴路”的結構,這些結構可以被單獨分析以確定系統的完整響應。
 訊號流圖的示例。
訊號流圖的示例。
前向路徑 是訊號流圖中連線輸入和輸出的路徑,並且不超過任何單個節點或路徑一次。單個系統可以有多個前向路徑。
迴路 是訊號流圖中返回自身的結構。迴路不包含起點和終點,並且迴路的終點與迴路的起點是同一個節點。
如果迴路共用一個節點或一條線,則稱這些迴路相交。
迴路增益 是迴路的總增益,即從一個點開始,繞回路一週,回到起點。
系統的增量值,用希臘字母 Δ 表示,計算如下

其中
- A 是所有單個迴路增益的總和
- B 是所有不相交回路對的乘積之和
- C 是所有不相交回路三元組的乘積之和
- D 是所有不相交回路四元組的乘積之和
- 等等。
如果給定系統沒有不相交的迴路對,例如,B 和 B 後面的所有字母都將為零。
梅森公式 是確定系統增益的規則。梅森公式可以與框圖一起使用,但它最常(最容易)與訊號流圖一起使用。
如果我們已經計算出增量值(上面),那麼我們可以使用 梅森增益規則 來找到系統的完整增益

其中 M 是系統的總增益,表示為系統輸出增益 (yout) 與輸入增益 (yin) 的比率。Mk 是第 kth 個前向路徑的增益,Δk 是第 kth 個迴路的迴路增益。
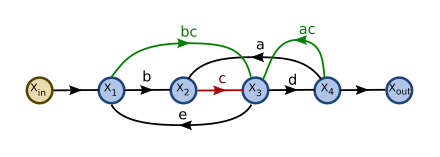
透過系統簡化解決訊號流圖 : 兩個相互交織的迴路
[編輯 | 編輯原始碼]此示例展示瞭如何使用系統化約簡規則求解包含五個未知數的五個方程組。自變數為  。因變數為
。因變數為  ,
, ,
, ,
, ,
, 。係數分別標記為
。係數分別標記為  。
。
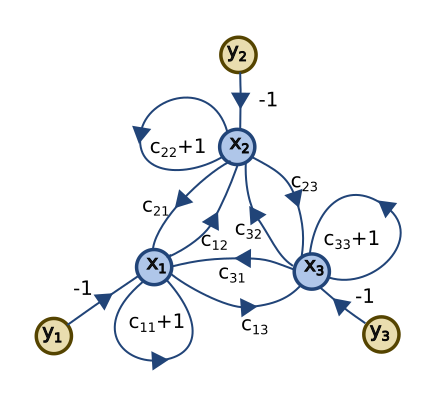
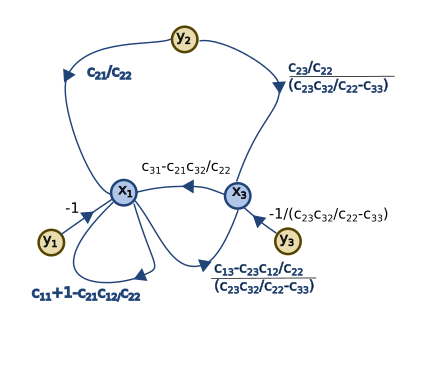
以下是起始訊號流圖


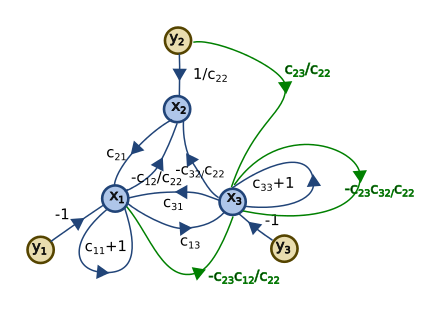
求解 的步驟如下。


沒有輸出流,也不是感興趣的節點。 

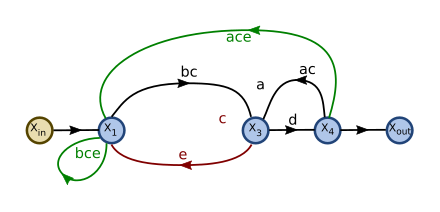



節點 沒有輸出流,也不是感興趣的節點。它將與其輸入流一起被刪除。










的輸出則被消除: 直接連線到 ,使用兩條替換邊增益的乘積。
直接連線到 ,使用兩條替換邊增益的乘積。
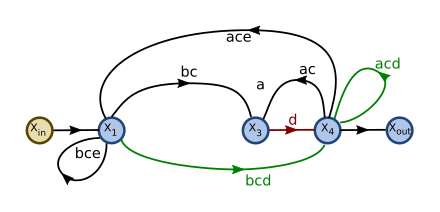
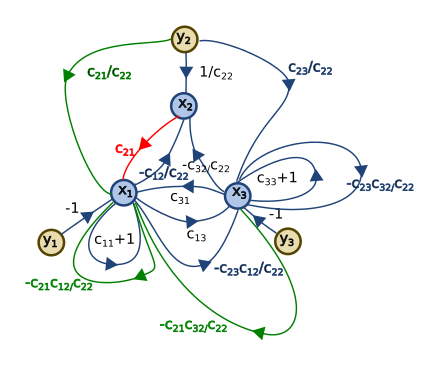
不是一個感興趣的變數;因此,它的節點及其輸入被消除。





不是感興趣的變數; 及其流入被消除




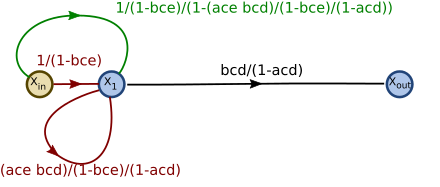
這個例子展示瞭如何使用系統縮減規則求解三個方程三個未知數的系統。
自變數是  ,
, ,
, 。因變數是 ,,。係數標記為
。因變數是 ,,。係數標記為  。求解 的步驟如下
。求解 的步驟如下









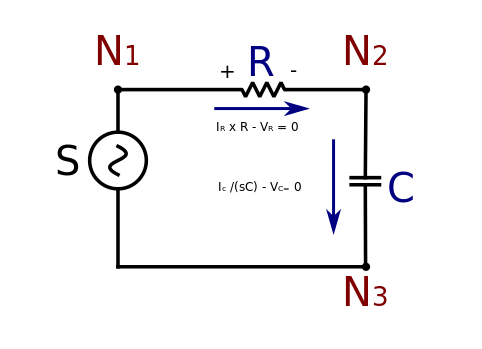
此插圖展示了電路的物理連線。獨立電壓源 S 與電阻器 R 和電容器 C 串聯連線。該示例從物理電路方程發展而來,並使用訊號流圖技術求解。極性很重要
- S 是一個電源,正極端子位於 N1,負極端子位於 N3
- R 是一個電阻器,正極端子位於 N1,負極端子位於 N2
- C 是一個電容器,正極端子位於 N2,負極端子位於 N3。
感興趣的未知變數是電容器 C 兩端的電壓。
解決方案方法
- 從物理網路中找到方程組。這些方程本質上是無因果的。
- 電容器和電阻器的支路方程。方程將使用拉普拉斯變換作為傳遞函式開發。
- 基爾霍夫電壓定律和電流定律
- 根據方程構建訊號流圖。
- 求解訊號流圖。
 展示了 R 和 C 的支路方程。
展示了 R 和 C 的支路方程。
電阻器 R (分支方程  )
)
[編輯 | 編輯原始碼]電阻器在時域中的分支方程為

在拉普拉斯變換後的訊號空間中

電容器 C (分支方程  )
)
[編輯 | 編輯原始碼]電容器在時域中的分支方程為

假設電容器最初是放電的,則該方程變為

對方程求導並乘以C,得到導數形式

在拉普拉斯變換後的訊號空間中


基爾霍夫電壓定律方程 
[編輯 | 編輯原始碼]該電路只有一個獨立迴路。其在時域中的方程為

在拉普拉斯變換後的訊號空間中

基爾霍夫電流定律方程 
[編輯 | 編輯原始碼]該電路具有三個節點,因此有三個基爾霍夫電流方程(此處表示為從節點流出的電流)。

在拉普拉斯變換後的訊號空間中

必須選擇一組獨立的方程。對於電流定律,需要刪除其中一個方程。在本例中,讓我們選擇  。
。
然後我們檢視方程清單以及每個方程所關聯的訊號。
| 方程 |
訊號 |

|

|

|

|
|
|

|

|

|

|

|
下一步是為每個方程分配一個訊號,該訊號將表示為一個節點。每個獨立的源訊號在訊號流圖中表示為一個源節點,因此沒有方程分配給獨立的源訊號 。從這組方程中可以得到許多有效的訊號流圖。每個方程只能使用一次,並且必須表示感興趣的變數。
。從這組方程中可以得到許多有效的訊號流圖。每個方程只能使用一次,並且必須表示感興趣的變數。
| 方程 |
訊號 |
分配的訊號節點 |
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|
|
|
|

|

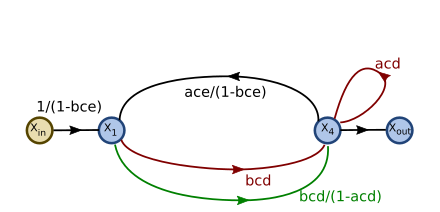
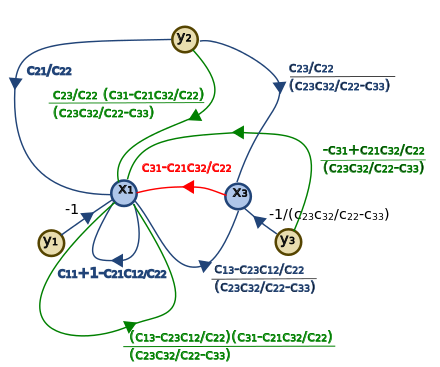
下一步是求解訊號流圖。
使用 Mason 或系統簡化,得到的訊號流圖是

 角度位置伺服和訊號流圖。θC = 期望角度指令,θL = 實際負載角度,KP = 位置環路增益,VωC = 速度指令,VωM = 電機速度感應電壓,KV = 速度環路增益,VIC = 電流指令,VIM = 電流感應電壓,KC = 電流環路增益,VA = 功率放大器輸出電壓,LM = 電機電感,VM = 電機電感上的電壓,IM = 電機電流,RM = 電機電阻,RS = 電流感應電阻,KM = 電機轉矩常數 (Nm/amp) ,T = 轉矩,M = 所有旋轉部件的慣性矩 α = 角加速度,ω = 角速度,β = 機械阻尼,GM = 電機反電動勢常數,GT = 測速計轉換增益常數。有一個前向路徑(以不同的顏色顯示)和六個反饋迴路。驅動軸被認為足夠堅固,不需要作為彈簧處理。常數以黑色顯示,變數以紫色顯示。
角度位置伺服和訊號流圖。θC = 期望角度指令,θL = 實際負載角度,KP = 位置環路增益,VωC = 速度指令,VωM = 電機速度感應電壓,KV = 速度環路增益,VIC = 電流指令,VIM = 電流感應電壓,KC = 電流環路增益,VA = 功率放大器輸出電壓,LM = 電機電感,VM = 電機電感上的電壓,IM = 電機電流,RM = 電機電阻,RS = 電流感應電阻,KM = 電機轉矩常數 (Nm/amp) ,T = 轉矩,M = 所有旋轉部件的慣性矩 α = 角加速度,ω = 角速度,β = 機械阻尼,GM = 電機反電動勢常數,GT = 測速計轉換增益常數。有一個前向路徑(以不同的顏色顯示)和六個反饋迴路。驅動軸被認為足夠堅固,不需要作為彈簧處理。常數以黑色顯示,變數以紫色顯示。




































 展示了 R 和 C 的支路方程。
展示了 R 和 C 的支路方程。


