
感官系統/視覺系統
一般來說,視覺系統依靠電磁 (EM) 波來為生物體提供更多關於其周圍環境的資訊。這些資訊可能與潛在的配偶、危險和食物來源有關。不同的生物體具有不同的組成部分,構成了所謂的視覺系統。
眼睛的複雜程度從簡單的眼點(僅僅是感光細胞的集合)到功能齊全的照相機眼不等。如果生物體具有不同型別的感光細胞,或對不同波長範圍敏感的細胞,則理論上該生物體將能夠感知顏色,或者至少能夠感知顏色差異。偏振是電磁輻射的另一種特性,一些生物體可以檢測到它,昆蟲和頭足類動物的準確度最高。
請注意,本文重點關注使用電磁波進行視覺。當然,一些生物體已經進化出其他方式來獲得視覺,或者至少用額外的感官資訊來補充它們所看到的。例如,鯨魚或蝙蝠,它們使用回聲定位。這在某種程度上可能是“看”,但並不完全正確。此外,“視覺”和“視覺的”這兩個詞通常與視覺波長範圍內的電磁波相關聯,視覺波長範圍通常定義為人眼視覺的相同波長限制。

由於某些生物體檢測到的電磁波頻率低於或高於人類,因此必須做出更好的定義。因此,我們將視覺波長範圍定義為 300nm 到 800nm 之間的電磁波波長。這在某些人看來可能有些隨意,但選擇錯誤的限制會導致某些鳥類的部分視覺不被視為視覺。此外,在這個波長範圍內,我們已經定義了某些生物體的熱視覺,例如蛇,這些生物體的熱視覺不被視為視覺。因此,蛇利用其對 5000nm 到 30,000nm(紅外線)之間的電磁波敏感的頰窩器官,並非“看見”,而是以某種方式“感受”遠處的事物。即使是失明的標本也被記錄到可以瞄準和攻擊特定的身體部位。
首先,我們將簡要描述不同型別的視覺系統感官器官,然後詳細解釋人類視覺中的組成部分、人類視覺通路中的訊號處理,最後以這些階段產生的感知結果為例進行說明。
視覺,或稱看見的能力,取決於視覺系統感官器官或眼睛。眼睛的構造多種多樣,其複雜程度取決於生物體的需求。不同的構造具有不同的功能,對不同的波長敏感,具有不同的銳度,還需要不同的處理來理解輸入,並且需要不同數量的眼睛才能達到最佳效果。檢測和解讀電磁波的能力已被證明對大多數生命形式來說都是一項寶貴的財富,從而增加了利用它的生物體的生存機會。在光線不足或完全沒有光線的環境中,生命形式無法獲得視覺的額外優勢,這最終導致視覺感官器官萎縮,隨後更多地依賴其他感官(例如,一些穴居動物、蝙蝠等)。有趣的是,視覺感官器官似乎被調整到光學視窗,光學視窗定義為穿過大氣層到達地面的電磁波波長(300nm 到 1100nm)。如下圖所示。您可能會注意到存在其他“視窗”,例如紅外線視窗,這在一定程度上解釋了蛇的熱“視覺”,以及射頻 (RF) 視窗,目前尚無已知的生命形式能夠檢測到它。

隨著時間的推移,進化產生了多種眼睛構造,其中一些眼睛構造已經進化了多次,從而使具有相似生態位的生物體具有相似之處。有一個基本方面在本質上是相同的,無論物種或感官器官型別的複雜程度如何,都普遍使用稱為視蛋白的光敏蛋白。雖然不專注於分子基礎,但各種構造可以分為不同的組別。
- 眼點
- 頰窩眼
- 針孔眼
- 晶狀體眼
- 屈光角膜眼
- 反光眼
- 複眼
最簡單的眼睛構造使生物體能夠簡單地感知環境光,使生物體能夠知道是否有光。它通常只是同一位置上的一簇感光細胞的集合,因此有時被稱為眼點、眼斑或單眼。透過新增更多角度結構或凹陷眼點,生物體也可以獲得方向資訊,這是影像形成的必要條件。這些所謂的頰窩眼是迄今為止最常見的視覺感官器官型別,在所有已知物種中超過 95% 都能找到。
.jpg)
將這種方法推向明顯的極端會導致凹坑變成一個巨大的結構,這會提高影像的清晰度,但會損失強度。換句話說,強度或亮度與清晰度之間存在權衡。鸚鵡螺就是一個例子,鸚鵡螺屬於鸚鵡螺科,被認為是活化石的有機體。它們是唯一已知具有這種型別的眼睛的物種,被稱為針孔眼,它與針孔相機或暗箱完全類似。此外,與更先進的相機一樣,鸚鵡螺能夠調節光圈的大小,從而分別降低或提高眼睛的解析度,以及降低或提高影像亮度。與相機一樣,緩解強度/解析度權衡問題的方法是加入一個透鏡,這是一種將光聚焦到中心區域的結構,該區域通常具有更高的感光器密度。透過調整透鏡的形狀並將其移動,以及控制光圈或瞳孔的大小,生物體可以適應不同的條件並關注任何視覺場景中的特定感興趣區域。前面提到的各種眼睛構造的最後一次升級是加入了折射性角膜。具有這種結構的眼睛將眼睛的總光學能力的三分之二委託給了角膜內部的高折射率液體,從而實現了非常高解析度的視覺。大多數陸地動物,包括人類,都具有這種特殊的構造的眼睛。此外,透鏡結構、透鏡數量、感光器密度、中央凹形狀、中央凹數量、瞳孔形狀等也存在許多變化,始終是為了提高相關生物體的生存機會。這些變化導致眼睛的外觀多種多樣,即使在單一的眼部構造類別中也是如此。為了說明這一點,下面展示了一組具有相同眼部類別(折射性角膜眼)的動物照片。
 |
 |
 |
 |
.jpg) |
例如在軟體動物中可以找到一種稱為反光眼的替代透鏡方法。這些生物體沒有使用透鏡或透鏡系統將光聚焦到眼睛後部的單一點的傳統方式,而是在其眼腔內部具有鏡面結構,這些結構將光反射到中心部分,就像拋物面天線一樣。儘管沒有已知的具有反光眼能夠形成影像的生物體例子,但至少有一種魚類,即幽靈魚(Dolichopteryx longipes),將它們與“普通”的帶透鏡的眼睛結合使用。

最後一組眼睛,見於昆蟲和甲殼類動物,稱為複眼。這些眼睛由許多稱為小眼的官能亞單位組成,每個小眼都由一個表面、一個透明的晶體錐和用於檢測的光敏細胞組成。此外,每個小眼都由色素細胞隔開,確保入射光儘可能平行。每個小眼的輸出組合形成馬賽克影像,其解析度與小眼單元的數量成正比。例如,如果人類有複眼,那麼眼睛將覆蓋我們的整個臉部才能保持相同的解析度。需要注意的是,複眼有很多型別,但深入探討這個話題超出了本文的範圍。
不僅眼睛的型別不同,眼睛的數量也各不相同。正如您所知,人類通常有兩隻眼睛,而蜘蛛則有不同數量的眼睛,大多數物種有 8 只。通常,蜘蛛的不同對眼睛的大小也不同,不同的大小具有不同的功能。例如,在跳蛛中,2 只較大的前向眼睛賦予了蜘蛛出色的視覺敏銳度,主要用於瞄準獵物。6 只較小的眼睛解析度較差,但有助於蜘蛛避開潛在的危險。展示蛛形綱動物眼睛拓撲結構的可變性,下面展示了跳蛛和狼蛛眼睛的兩張照片。
- 蜘蛛的眼睛拓撲結構
-
 狼蛛
狼蛛 -
 跳蛛
跳蛛


我們人類是視覺生物,因此我們的眼睛非常複雜,包含許多部件。在本章中,我們嘗試描述這些部件,從而深入瞭解人類視覺的特性和功能。
光線透過眼睛前部的黑色孔隙或瞳孔進入眼睛結構。黑色外觀是由於光線被眼睛內部的組織完全吸收造成的。只有透過這個瞳孔,光線才能進入眼睛,這意味著入射光線的數量實際上由瞳孔的大小決定。圍繞瞳孔的色素括約肌充當眼睛的光圈光闌。虹膜中色素的含量決定了人類眼睛的不同顏色。
除了這一層色素外,虹膜還有兩層睫狀肌。一層是稱為瞳孔括約肌的環形肌,它收縮使瞳孔變小。另一層是稱為瞳孔開大肌的平滑肌,它收縮使瞳孔放大。這些肌肉的組合可以根據人的需求或情況擴張/收縮瞳孔。睫狀肌由睫狀小帶控制,睫狀小帶是纖維,它們還會改變晶狀體的形狀並將其固定到位。
晶狀體位於瞳孔的正後方。它的形狀和特性揭示了與相機鏡頭類似的目的,但它們的功能略有不同。晶狀體的形狀由睫狀小帶的拉力調節,從而改變焦距。晶狀體與角膜一起可以改變焦點,這使得它成為一個非常重要的結構,然而,眼睛的總光學能力只有三分之一是由晶狀體本身造成的。它也是眼睛的主要過濾器。晶狀體纖維構成了晶狀體的大部分物質,它們是細長的細胞,缺乏大部分細胞機制以促進透明度。它們與稱為晶狀體的可溶性蛋白質一起,增加了晶狀體的折射率。纖維也參與晶狀體本身的結構和形狀。


角膜負責眼睛總光學能力的其餘 2/3,覆蓋著虹膜、瞳孔和晶狀體。它在光線穿過晶狀體之前聚焦穿過虹膜的光線。角膜僅有 0.5 毫米厚,由 5 層組成
- 上皮:一層覆蓋角膜表面的上皮組織。
- 鮑曼膜:一層由強韌的膠原纖維組成的厚保護層,維持角膜的整體形狀。
- 基質:一層由平行的膠原原纖維組成的層。這一層佔角膜厚度的 90%。
- Descemet 膜和內皮:是兩層調整到充滿房水液的前房,房水液由睫狀體產生。這種液體滋潤晶狀體,清潔它並維持眼球的壓力。位於角膜和虹膜之間的房水,包含小梁網結構,透過該結構,液體透過 Schlemm 管排出,穿過後房。
角膜表面位於兩個保護膜下方,稱為鞏膜和 Tenon 囊。這兩個保護層都完全包裹著眼球。鞏膜由膠原蛋白和彈性纖維構成,保護眼睛免受外部損傷,這一層也形成了眼睛的白膜。它被神經和血管穿透,最大的孔留給視神經。此外,它被結膜覆蓋,結膜是眼球表面的一層透明粘膜。這種膜也襯在眼瞼的內側。它起到潤滑劑的作用,並與淚腺一起產生淚液,潤滑和保護眼睛。剩下的保護層,眼瞼,也起著將這種潤滑劑塗抹在周圍的作用。
眼球由複雜的肌肉結構外眼肌移動,包括四條直肌——下直肌、內直肌、外直肌和上直肌,以及兩條斜肌——下斜肌和上斜肌。這些肌肉的位置以及功能如下所示

如您所見,外眼肌(2、3、4、5、6、8)附著在眼球的鞏膜上,並起源於 Zinn 環,Zinn 環是圍繞視神經的纖維肌腱。透過滑車作為滑輪和上斜肌作為繩索,形成一個滑輪系統,這是為了以正確的方式重新引導肌肉力量。其餘的外眼肌有通往眼睛的直接路徑,因此不形成這些滑輪系統。使用這些外眼肌,眼睛可以向上、向下、向左、向右旋轉,並且可以透過這些動作的組合實現其他運動。
其他運動對於我們能夠看清事物也很重要。輻合運動使雙眼視覺能夠正常發揮作用。稱為掃視的無意識快速運動對於人們保持物體聚焦至關重要。掃視是一種在眼睛掃描視野時進行的抖動運動,目的是稍微移動注視點。當您用目光跟隨移動的物體時,您的眼睛會執行所謂的平滑追蹤。稱為眼球震顫的其他非自願運動是由前庭系統發出的訊號引起的,它們共同構成了前庭眼反射。
腦幹控制著所有眼睛的運動,不同的區域負責不同的運動。
- 腦橋:快速水平運動,例如掃視或眼球震顫
- 中腦:垂直和旋轉運動
- 小腦:微調
- 埃丁格-韋斯特法爾核:輻輳運動

在進行光轉導之前,入射的電磁輻射會穿過角膜、晶狀體和黃斑。這些結構也充當過濾器,以減少不需要的電磁輻射,從而保護眼睛免受有害輻射的傷害。在“角膜、晶狀體和色素上皮對光線的過濾”圖中可以看到每個元素的過濾響應。可以觀察到,角膜衰減較低波長的光,而對較高波長的光幾乎沒有影響。晶狀體阻擋了大約 25% 的低於 400nm 的電磁輻射,以及超過 50% 的低於 430nm 的電磁輻射。最後,色素上皮是光感受之前最後的過濾階段,它會影響大約 30% 的 430nm 到 500nm 之間的電磁輻射。
眼睛的一部分,標誌著從非感光區域到感光區域的過渡,被稱為鋸齒緣。感光區域被稱為視網膜,它是眼睛後部的感光結構。視網膜由多個層組成,如下所示,包含數百萬個稱為視杆細胞和視錐細胞的光感受器,它們捕獲光線並將它們轉換為電脈衝。這些脈衝的傳遞由神經節細胞神經性地啟動,並透過視神經傳導,視神經是資訊離開眼睛的唯一途徑。

右側顯示了視網膜結構的概念圖解。正如我們所看到的,主要有五種細胞型別
- 感光細胞
- 水平細胞
- 雙極細胞
- 無長突細胞
- 神經節細胞
感光細胞可以進一步細分為兩種主要型別,稱為視杆細胞和視錐細胞。在視網膜的大部分割槽域,視錐細胞的數量遠少於視杆細胞,但在黃斑中,尤其是在其稱為中央凹的中心區域,視錐細胞的數量非常多。在這個中心區域,每個感光視錐細胞都連線到一個神經節細胞。此外,該區域的視錐細胞略小於平均視錐細胞的大小,這意味著每個區域可以容納更多的視錐細胞。由於這種比例和視錐細胞的高密度,這是我們視覺敏銳度最高的地方。

人眼有三種視錐細胞,每種視錐細胞由於三種稱為視蛋白的色素而對特定波長範圍的光線做出反應。每種色素對紅光、藍光或綠光的波長敏感,因此我們有藍色、綠色和紅色視錐細胞,也稱為 S 型、M 型和 L 型視錐細胞,分別代表它們對短波長、中波長和長波長的敏感性。它由稱為視蛋白的蛋白質和稱為視黃醛的結合髮色團組成。視錐細胞的主要組成部分是突觸末梢、內段和外段、內部細胞核和線粒體。
三種視錐細胞的光譜敏感性
- 1. S 型視錐細胞吸收短波光,即藍紫光。S 型視錐細胞的最大吸收波長為 420nm
- 2. M 型視錐細胞吸收藍綠色到黃色的光。在這種情況下,最大吸收波長為 535nm
- 3. L 型視錐細胞吸收黃色到紅色的光。最大吸收波長為 565nm

內段包含細胞器和細胞核以及細胞器。色素位於外段,作為跨膜蛋白附著在膜上,位於細胞膜的內陷中,形成膜盤,在顯示視杆細胞和視錐細胞基本結構的圖中可以清楚地看到這些膜盤。這些盤狀結構最大化了細胞的接收面積。許多脊椎動物的視錐細胞光感受器包含稱為油滴的球形細胞器,據認為它們構成了眼內過濾器,可以增加對比度,減少眩光並減少由線粒體從外周到中心的尺寸梯度引起的色差。
視杆細胞的結構與視錐細胞相似,但它們包含視紫紅質而不是視蛋白,這使得它們能夠檢測低強度光,並且比視錐細胞敏感 100 倍。視紫紅質是人類視杆細胞中唯一發現的色素,它位於色素上皮的外側,與視錐細胞類似,透過採用盤狀結構來最大化吸收面積。與視錐細胞類似,細胞的突觸末梢將其與雙極細胞連線起來,內段和外段由纖毛連線。
視紫紅質吸收 400-600nm 之間的光,最大吸收波長約為 500nm。此波長對應於藍綠色光,這意味著在夜間,藍色比紅色看起來更強烈。


波長超出 400-700nm 範圍的電磁波既不被視杆細胞也不被視錐細胞檢測到,這最終意味著它們對人類來說是不可見的。
水平細胞位於視網膜的核心層。有兩種型別的水平細胞,並且這兩種型別的細胞都會因光而超極化,即它們變得更負。A 型包含一種稱為 HII-H2 的亞型,它主要與 S 型視錐細胞相互作用。B 型細胞具有一種稱為 HI-H1 的亞型,它具有樹突樹和軸突。前者主要接觸 M 型和 L 型視錐細胞,後者接觸視杆細胞。與視錐細胞的接觸主要是透過抑制性突觸實現的,而細胞本身則透過間隙連線連線成網路。

雙極細胞在外叢狀層中延伸單個樹突,其細胞體(胞體)位於核心層。樹突專門與視錐細胞和視杆細胞相互連線,我們區分一個視杆雙極細胞和九個或十個視錐雙極細胞。這些細胞使用軸突在內叢狀層中與無長突細胞或神經節細胞分支。視杆雙極細胞連線到三聯突觸或 18-70 個視杆細胞。它們的軸突在內叢狀層突觸末梢周圍延伸,這些突觸末梢包含帶狀突觸並接觸二聯突觸中的一對細胞突起。它們透過 AII 無長突細胞連線與神經節細胞連線。
無長突細胞可以在視網膜的核心層和神經節細胞層中找到。偶爾,它們也會出現在內叢狀層中,在那裡它們充當訊號調節器。根據其大小,它們被歸類為窄視野、小視野、中視野或寬視野。然而,存在許多分類,導致超過 40 種不同型別的無長突細胞。
神經節細胞是將視覺訊號從視網膜傳遞到大腦的最終傳遞者。視網膜中最常見的神經節細胞是矮小神經節細胞和傘狀神經節細胞。訊號在透過所有視網膜層後,傳遞給這些細胞,這些細胞是視網膜處理鏈的最後階段。所有資訊都收集在這裡,然後轉發到視網膜神經纖維和視神經。神經節細胞軸突融合形成視神經的地方稱為視盤。該神經主要由視網膜神經節細胞軸突和波特細胞構成。大多數軸突將資料傳遞到外側膝狀體核,它是神經大部分割槽域的終止樞紐,並將資訊轉發到視覺皮層。一些神經節細胞也會對光做出反應,但由於這種反應比視杆細胞和視錐細胞的反應慢,因此據信它與感知環境光水平和調整生物鐘有關。
如前所述,視網膜是眼睛的主要組成部分,因為它包含所有感光細胞。如果沒有它,眼睛將類似於沒有 CCD(電荷耦合器件)感測器的數碼相機。本部分詳細闡述了視網膜如何感知光線,光學訊號如何傳遞到大腦,以及大腦如何處理訊號以形成足夠的資訊進行決策。
視覺始於光線照射到視網膜中的感光細胞。視網膜桿狀細胞和錐狀細胞中的光吸收視色素、各種酶和遞質,將可見電磁刺激轉化為電脈衝,這一過程稱為光電轉換。以視杆細胞為例,進入的可見電磁輻射照射到視紫紅質分子上,視紫紅質分子是存在於視杆細胞外盤結構中的跨膜分子。每個視紫紅質分子都包含一個稱為視蛋白的螺旋簇,包圍著11-順式視黃醛,這是分子中會因進入光子的能量而發生變化的部分。在生物分子中,由於這種能量而導致構象變化的部分或分子片段有時被稱為髮色團。11-順式視黃醛響應進入的能量而伸直,轉變為全反式視黃醛,這迫使視蛋白螺旋進一步分開,導致特定的反應位點暴露出來。這種“啟用”的視紫紅質分子有時被稱為視紫紅質II。從這一點開始,即使可見光刺激停止,反應也會繼續。然後,視紫紅質II可以與大約100個稱為轉導蛋白的Gs蛋白分子反應,然後在GDP轉化為GTP後產生αs和βγ。啟用的αs-GTP隨後與cGMP磷酸二酯酶(PDE)結合,抑制正常的離子交換功能,導致細胞質中陽離子濃度降低,從而導致細胞極化發生變化。
天然的光電轉換反應具有驚人的放大能力。單個視紫紅質分子被單個光量子啟用,每秒可導致高達106個cGMP分子水解。
- 光子與光感受器中的視黃醛相互作用。視黃醛發生異構化,從11-順式構型轉變為全反式構型。
- 視黃醛不再適合視蛋白結合位點。
- 因此,視蛋白髮生構象變化,轉變為視紫紅質II。
- 視紫紅質II不穩定並分裂,產生視蛋白和全反式視黃醛。
- 視蛋白啟用調節蛋白轉導蛋白。這導致轉導蛋白與其結合的GDP分離,並結合GTP,然後轉導蛋白的α亞基與其β和γ亞基分離,GTP仍然與α亞基結合。
- α亞基-GTP複合物啟用磷酸二酯酶。
- 磷酸二酯酶將cGMP分解為5'-GMP。這降低了cGMP的濃度,因此鈉通道關閉。
- 鈉通道的關閉導致細胞由於持續的鉀電流而超極化。
- 細胞的超極化導致電壓門控鈣通道關閉。
- 隨著感光細胞中鈣水平下降,細胞釋放的神經遞質穀氨酸的量也下降。這是因為穀氨酸囊泡與細胞膜融合並釋放其內容物需要鈣。
- 感光細胞釋放的穀氨酸量減少導致中間神經元“ON型”雙極細胞(視杆和視錐“ON型”雙極細胞)去極化和視錐“OFF型”雙極細胞超極化。
在沒有可見電磁刺激的情況下,含有離子、蛋白質和其他分子的視杆細胞具有約-40mV的膜電位差。與其他神經細胞相比,這相當高(-65mV)。在這種狀態下,神經遞質穀氨酸持續從軸突末梢釋放並被鄰近的雙極細胞吸收。隨著可見電磁輻射的進入和前面提到的級聯反應,電位差下降到-70mV。這種細胞的超極化導致釋放的穀氨酸量減少,從而影響雙極細胞的活性,並隨後影響視覺通路中的後續步驟。
視錐細胞和感光神經節細胞中也存在類似的過程,但使用不同的視蛋白。視蛋白I到III(分別為黃綠色、綠色和藍紫色)存在於三種不同的視錐細胞中,而黑視蛋白(藍色)存在於感光神經節細胞中。

不同的雙極細胞對釋放的穀氨酸的變化反應不同。所謂的“ON型”和“OFF型”雙極細胞用於形成從視錐細胞到雙極細胞的直接訊號流。“ON型”雙極細胞將透過可見電磁刺激去極化,相應的“ON型”神經節細胞將被啟用。另一方面,“OFF型”雙極細胞透過可見電磁刺激超極化,“OFF型”神經節細胞被抑制。這是直接訊號流的基本途徑。側向訊號流將從視杆細胞開始,然後傳遞到雙極細胞、無長突細胞和“OFF型”雙極細胞,這些細胞被視杆-無長突細胞抑制,“ON型”雙極細胞透過電突觸被刺激,在所有這些步驟之後,訊號將到達“ON型”或“OFF型”神經節細胞,並且側向訊號流的整個通路建立起來。
當“ON型”神經節細胞中的動作電位(AP)由可見電磁刺激觸發時。“ON型”神經節細胞的動作電位頻率將隨著感受器電位增加而增加。換句話說,動作電位取決於感受器電位的幅度。神經節細胞中刺激和抑制效應影響動作電位頻率的區域稱為感受野(RF)。在神經節細胞周圍,感受野通常由兩個區域組成:中心區和環狀周邊區。它們在可見電磁適應過程中是可以區分的。中心區上的可見電磁刺激可能導致動作電位頻率增加,而周邊區上的刺激將降低動作電位頻率。當光源關閉時,就會發生興奮。因此,名稱“ON型”感受野(中心區“ON型”)指的是這種型別的區域。當然,“OFF型”神經節細胞的感受野作用方式相反,因此被稱為“OFF型”感受野(中心區“OFF型”)。感受野由水平細胞組織。周邊區域的脈衝將被脈衝並傳遞到中心區域,並在那裡形成所謂的刺激對比。此功能將使黑暗看起來更暗,光線看起來更亮。如果整個感受野都暴露在光線下,中心區域的脈衝將佔主導地位。
如前所述,神經節細胞的軸突在視網膜的視盤處匯聚,形成視神經。這些纖維在束內以特定的順序排列。來自視網膜黃斑區的纖維位於中心部分,而來自視網膜顳側半部的纖維佔據周邊部分。當這些纖維在眼腔外時,會發生部分交叉或交叉。來自每個視網膜鼻側半部的纖維交叉到對側半部並延伸到大腦。來自顳側半部的纖維保持未交叉。這種部分交叉稱為視交叉,視交叉之後的視神經稱為視束,主要是為了將其與單個視網膜神經區分開來。部分交叉的功能是將雙眼產生的右側視野資訊僅傳遞到大腦的左側半部,反之亦然。因此,來自身體右側和右側視野的資訊在到達前腦後部(間腦)時都會傳遞到大腦的左側部分。

視束纖維和神經細胞之間的資訊傳遞發生在位於大腦丘腦的視覺訊號處理中心——外側膝狀體。從這裡,資訊傳遞到大腦對應側枕葉皮層的神經細胞。來自視網膜到大腦的連線可以分為“小細胞通路”和“大細胞通路”。小細胞通路訊號顏色和精細細節,而大細胞通路檢測快速移動的刺激。

來自標準數碼相機的訊號大致對應於小細胞通路的訊號。為了模擬小細胞通路的反應,研究人員一直在開發神經形態感測系統,試圖模擬神經系統中基於脈衝的計算。因此,他們在神經形態電子系統中使用了一種稱為“地址事件表示”的方案來進行訊號傳輸(Liu和Delbruck 2010 [1])。
在解剖學上,視網膜的大細胞和小細胞神經節細胞分別投射到外側膝狀核(LGN)的2個腹側大細胞層和4個背側小細胞層。六個LGN層中的每一個都接收來自同側眼或對側眼(即左眼的視網膜神經節細胞交叉並投射到右LGN的第1、4和6層,右眼的視網膜神經節細胞投射(未交叉)到其第2、3和5層)的輸入。從這裡,來自左右眼的資訊被分開。
儘管人類視覺是由視網膜的兩半組合而成,訊號由對側大腦半球處理,但視覺場被認為是一個平滑而完整的單元。因此,這兩個視覺皮層區域被認為是緊密相連的。這種連線稱為胼胝體,由神經元、軸突和樹突組成。由於樹突與半球的相關點形成突觸連線,因此對一個半球上的每個點的電刺激都會導致對另一個半球上互連點的刺激。這條規則的唯一例外是初級視覺皮層。
突觸由視束在側膝狀體的各個層中形成。然後,這些三級神經細胞的軸突向上傳遞到大腦皮層每個枕葉的距狀溝。因為它是由視網膜神經細胞中的白纖維和軸突帶對穿過它而形成的,所以它被稱為紋狀皮層,這恰好是我們的初級視覺皮層,有時被稱為V1。在這一點上,來自不同眼睛的衝動匯聚到共同的皮層神經元,然後使一個區域中來自兩隻眼睛的完整輸入能夠用於感知和理解。模式識別是這部分大腦的一個非常重要的功能,病變會導致視覺識別問題或盲視。
基於視束纖維以有序的方式將資訊傳遞到側膝狀體,然後傳遞到紋狀區,如果發現了視網膜上的一個單點刺激,那麼在側膝狀體和紋狀皮層中產生的電反應將在特定視網膜斑點上的一個小區域被發現。這是一種明顯的點對點訊號處理方式。如果刺激整個視網膜,則反應將發生在側膝狀體和紋狀皮層灰質區域。可以將這個大腦區域對映到視網膜視野,或者更常見的是視覺視野。
本書不討論這條通路中的任何後續步驟。請放心,存在許多更高級別和中心,專注於特定任務,例如顏色、方向、空間頻率、情緒等。
在更深入地瞭解視覺系統訊號處理的一些重要概念後,對處理過的感官資訊的理解或感知是拼圖中最後一塊重要的拼圖。視覺感知是將眼睛接收到的資訊轉化為對外部事物狀態的理解的過程。它使我們意識到周圍的世界,並讓我們更好地理解它。基於視覺感知,我們學習模式,然後在以後的生活中應用這些模式,並根據這些模式和獲得的資訊做出決策。換句話說,我們的生存依賴於感知。由於處理過程過於複雜,需要不同的專門機制來感知所看到的事物,因此視覺感知領域已被劃分為不同的子領域。這些子領域包括:顏色感知、運動感知、深度感知和人臉識別等。

儘管電子系統的計算能力不斷增強,但在許多工中,動物和人類仍然遠遠優於計算機——其中一項就是資訊的感知和語境化。經典計算機,無論是手機中的計算機還是佔據整個房間的超級計算機,本質上都是一個數字運算器。它可以在極短的時間內執行海量的計算。它缺乏的是對其正在處理的資訊進行抽象。如果將攝像頭連線到電腦上,它“感知”到的影像只是一張畫素網格,一個二維數字陣列。而人類會立即識別場景的幾何形狀、影像中的物體,甚至可能識別正在發生的事情的上下文。我們這種能力是由專門的生物機制提供的——大腦的視覺系統。它以分層的方式處理我們看到的所有事物,從影像的簡單特徵開始,到更復雜的特徵,一直到將物體分類到類別中。因此,視覺系統被認為具有深層層次結構。靈長類視覺系統的深層層次結構啟發了計算機科學家建立人工神經網路模型,這些模型也具有多個層,其中每一層都對輸入資料建立更高的泛化。
大約一半的人類新皮層專門用於視覺。視覺資訊的處理至少發生在10個功能層級上。早期視覺區域的神經元在視覺空間的小區域性區域內提取簡單的影像特徵。隨著資訊傳遞到更高的視覺區域,神經元對越來越複雜的特徵做出反應。隨著資訊處理層級的提高,表示變得更加不變——對精確的特徵大小、旋轉或位置不太敏感。此外,較高視覺區域神經元的感受野大小增加,表明它們被調整到更全域性的影像特徵。這種層次結構允許高效計算——不同的較高視覺區域可以使用在較低區域計算的相同資訊。早期視覺區域中生成的通用場景描述被大腦的其他部分用於完成各種不同的任務,例如物體識別和分類、抓取、操作、運動計劃等。
視覺資訊的處理早在任何皮層結構之前就已經開始了。視網膜上的感光細胞檢測光線並將訊號傳送到視網膜神經節細胞。感光細胞的感受野大小為一度的百分之一(當你的手臂伸直在你面前時,一度大的感受野大約是你拇指的大小)。神經節細胞的輸入數量及其感受野大小取決於位置——在視網膜中心,它接收來自少至五個受體的訊號,而在周圍,單個細胞可以有數千個輸入。這意味著最高的空間解析度位於視網膜中心,也稱為中央凹。由於此特性,靈長類動物擁有一個注視控制機制,該機制引導視線,以便感興趣的特徵投射到中央凹上。
神經節細胞被選擇性地調整以檢測影像的各種特徵,例如亮度對比度、顏色對比度以及運動的方向和速度。所有這些特徵都是進一步處理管道中使用的主要資訊。如果存在神經節細胞無法檢測到的視覺刺激,那麼這些刺激也無法用於任何皮層視覺區域。
神經節細胞投射到丘腦中的一個區域,稱為外側膝狀體核(LGN),後者又將訊號傳遞到皮層。目前還沒有發現LGN中發生任何重要的計算——視網膜神經節細胞和LGN細胞之間幾乎存在一對一的對應關係。然而,只有5%的LGN輸入來自視網膜——所有其他輸入都是皮層反饋投射。儘管視覺系統通常被認為是一個前饋系統,但迴圈反饋連線以及橫向連線是整個視覺皮層中常見的一個特徵。反饋的作用尚未完全清楚,但有人提出將其歸因於諸如注意力、期望、想象以及填補缺失資訊等過程。

視覺皮層可以分為三個大區域——枕葉區域,它接收來自LGN的輸入,然後將輸出傳送到背側和腹側通路。枕葉區域包括V1-V4和MT區域,它們處理視覺資訊的各個方面併產生通用場景表示。背側通路參與空間分析和動作計劃。腹側通路參與物體識別和分類。
V1是第一個處理視覺資訊的皮層區域。它對邊緣、光柵、線端、運動、顏色和視差(點在左右視網膜上的投影之間的角度差)敏感。層次化自下而上處理的最直接示例是來自幾個具有中心-周圍感受野的神經節細胞的輸入的線性組合,以建立條形的表示。這是由V1的簡單細胞完成的,並且首先由著名的神經科學家Hubel和Wiesel描述。這種資訊整合意味著簡單細胞對條形的確切位置敏感,並且具有相對較小的感受野。V1的複雜細胞接收來自簡單細胞的輸入,並且雖然也對線性方向模式做出反應,但它們對條形的確切位置不敏感,並且具有更大的感受野。此步驟中存在的計算可能是一個類似於MAX的操作,該操作產生的響應幅度類似於與各個刺激相關的較大響應。一些簡單細胞和複雜細胞也可以檢測條形的末端,並且一部分V1細胞也對其各自感受野內的區域性運動敏感。
V2區域具有更復雜的輪廓表示,包括紋理定義的輪廓、虛幻輪廓和具有邊界所有權的輪廓。V2還在V1中的絕對視差檢測的基礎上構建,並且具有對相對視差敏感的細胞,即空間中兩點之間絕對視差的差異。V4區域接收來自V2和V3區域的輸入,但關於V3中發生的計算知之甚少。V4區域具有對具有不同曲率的輪廓和具有特定角度的頂點敏感的神經元。另一個重要特徵是亮度不變色調的編碼。這與V1形成對比,在V1中,神經元響應沿兩個主軸(紅-綠和黃-藍)的顏色對立,而不是實際的顏色。V4進一步輸出到腹側通路,到顳下皮層(IT),透過損傷研究表明,顳下皮層對於物體辨別至關重要。

下顳葉皮層 (IT) 分為兩個區域:TEO 和 TE。TEO 區域整合有關多個輪廓元素的形狀和相對位置的資訊,並且主要包含對特徵的簡單組合做出反應的細胞。TEO 神經元的感受野大小約為 3-5 度。TE 區域包含感受野明顯更大的細胞(10-20 度),這些細胞對人臉、手和複雜的特徵配置做出反應。TE 中的細胞對視覺特徵做出反應,這些特徵是對感興趣物體更簡單的概括,但比簡單的條形或斑點更復雜。田中等人使用刺激減少方法證明了這一點,首先測量對物體的反應,然後用更簡單的表示替換物體,直到將 TE 神經元正在響應的關鍵特徵縮小範圍。
IT 中的神經元似乎將腹側通路中較低層級的各種中等複雜度的特徵整合在一起,以構建物體部件的模型。對特定物體有選擇性的 TE 中的神經元必須滿足兩個看似矛盾的要求——選擇性和不變性。它們必須透過對視網膜影像中特徵的敏感性來區分不同的物體。然而,同一個物體可以從不同的角度和距離在不同的光照條件下觀察,產生同一個物體的差異很大的視網膜影像。為了將所有這些影像視為等價,必須匯出對某些變換(例如位置、照明、視網膜上的大小等變化)具有魯棒性的不變特徵。TE 區域的神經元顯示出對位置和大小以及部分遮擋、深度位置和照明方向的不變性。深度旋轉已被證明具有最弱的不變性,除非物體是人臉。
物體類別在 TE 區域中尚未明確存在——一個神經元可能通常對同一類別的幾個但不包括所有樣本做出反應(例如,樹的影像),並且它也可能對不同類別的樣本做出反應(例如,樹和非樹)。物體識別和分類很可能涉及從更大數量的 TE 神經元中取樣,以及接收來自其他大腦區域的輸入,例如負責理解場景上下文的大腦區域。最近的讀出實驗表明,可以訓練統計分類器(例如支援向量機)根據少量 TE 神經元的反應來對物體進行分類。因此,原則上,TE 神經元群體可以透過其組合活動可靠地發出物體類別的訊號。有趣的是,也有一些關於內側顳葉中高度選擇性神經元的報道,這些神經元對非常特定的線索做出反應,例如不同影像中的比薩斜塔或特定人的面孔。
學習可以改變神經元的視覺特徵選擇性,學習的效果在更高的層次結構級別上變得更強。目前沒有關於視網膜學習的已知證據,並且 V1 中的方向圖似乎在很大程度上是由基因預先決定的。然而,練習方向識別可以透過增加調諧曲線的斜率來改善 V1 神經元的方向編碼。在 V4 中觀察到了類似但更大的效果。在 TE 區域,很少有視覺訓練對視覺感知產生明顯的生理影響,無論是在單細胞水平上還是在 fMRI 上。例如,將兩個物體相互變形會增加它們之間的感知相似性。總的來說,似乎即使是成年視覺皮層也具有相當大的可塑性,並且可塑性水平可以顯著提高,例如透過服用特定藥物或生活在豐富環境中。
與靈長類動物視覺系統的深度層次結構類似,深度學習架構試圖透過使用多級非線性變換來對輸入資料的較高層次抽象進行建模。Hubel 和 Wiesel 提出的模型,其中資訊從視網膜和 LGN 級聯整合並傳播到 V1 中的簡單細胞和複雜細胞,啟發了第一個深度學習架構之一——神經認知機(neocognitron)的建立,這是一種多層人工神經網路模型。它被用於不同的模式識別任務,包括手寫字元的識別。然而,訓練網路需要很長時間(以天為單位),並且自 20 世紀 80 年代誕生以來,深度學習直到 21 世紀初隨著數字資料的大量湧現和更快的訓練演算法的發明才受到廣泛關注。深度神經網路已證明自己在不久前似乎只有人類才能執行的任務中非常有效,例如識別照片中特定人員的面孔、理解人類語音(在某種程度上)以及翻譯外語文字。此外,它們已被證明對工業和科學有很大的幫助,例如尋找潛在的候選藥物、繪製大腦中真實神經網路的圖譜以及預測蛋白質的功能。必須注意的是,深度學習只是非常鬆散地受到大腦的啟發,並且更像是計算機科學/機器學習領域的成就,而不是神經科學的成就。基本相似之處在於深度神經網路由以非線性方式整合資訊輸入的單元(神經元)組成,並相互發送訊號(突觸),並且存在資料表示的抽象程度不斷提高的不同級別。深度學習中使用的“神經元”的學習演算法和數學描述與大腦中發生的實際過程非常不同。因此,深度學習的研究,雖然極大地推動了更復雜的人工智慧的發展,但只能對大腦提供有限的見解。
 |
 |

- 關於視覺系統中深度層次結構的論文
- Kruger, N.; Janssen, P.; Kalkan, S.; Lappe, M.; Leonardis, A.; Piater, J.; Rodriguez-Sanchez, A. J.; Wiskott, L. (2013 年 8 月)。“靈長類視覺皮層中的深度層次結構:我們能從計算機視覺中學到什麼?”。IEEE 模式分析與機器智慧彙刊。35(8):1847–1871。doi:10.1109/TPAMI.2012.272.
- Poggio, Tomaso; Riesenhuber, Maximilian (1999 年 11 月 1 日)。自然神經科學。2(11):1019–1025。doi:doi:10.1038/14819.
{{cite journal}}: 檢查|doi=值(幫助);缺少或為空|title=(幫助)
- 刺激減少實驗
- Tanaka, Keiji (1996 年 3 月)。“下顳葉皮層和物體視覺”。神經科學年鑑。19(1):109–139。doi:10.1146/annurev.ne.19.030196.000545.
- 視覺系統中學習的證據
- Li, Nuo; DiCarlo, James J. (2010年9月23日). "無監督自然視覺體驗快速重塑下顳葉皮層中大小不變的目標表徵". 神經元. 67 (6): 1062–1075. doi:10.1016/j.neuron.2010.08.029.
- Raiguel, S.; Vogels, R.; Mysore, S. G.; Orban, G. A. (2006年6月14日). "學會識別差異會特異性地改變資訊量最大的V4神經元". 神經科學雜誌. 26 (24): 6589–6602. doi:10.1523/JNEUROSCI.0457-06.2006.
- Schoups, A; Vogels, R; Qian, N; Orban, G (2001年8月2日). "練習方向識別提高了V1神經元的方向編碼". 自然. 412 (6846): 549–53. PMID 11484056.
- 深度學習研究現狀的最新且易於理解的概述
- Jones, Nicola (2014年1月8日). "計算機科學:學習機器". 自然. 505 (7482): 146–148. doi:10.1038/505146a.
運動知覺是推斷運動物體速度和方向的過程。人類的V5區和靈長類動物的MT(中顳葉)區負責運動的皮層感知。V5區是紋外皮層的一部分,紋外皮層是大腦枕葉中靠近初級視覺皮層的一個區域。V5區的功能是檢測視覺刺激的速度和方向,並將區域性視覺運動訊號整合為全域性運動。V1區或初級視覺皮層位於大腦兩個半球的枕葉中。它處理視覺資訊皮層處理的第一階段。該區域包含眼睛覆蓋的視野的完整地圖。V5區和V1區(初級視覺皮層)的區別在於,V5區可以將區域性訊號或物體各個部分的運動整合到整個物體的全域性運動中。另一方面,V1區對感受野內發生的區域性運動做出反應。來自這些眾多神經元的估計值在V5區中被整合。
運動被定義為視網膜光照在空間和時間上的變化。運動訊號被分為一階運動和二階運動。這些運動型別將在以下段落中簡要描述。

一階運動知覺是指當兩個或多個視覺刺激隨時間開啟和關閉併產生不同的運動知覺時感知到的運動。一階運動也被稱為“表觀運動”,它用於電視和電影中。一個例子是“β運動”,這是一種錯覺,其中固定的影像似乎在移動,即使它們在現實中並沒有移動。這些影像呈現出運動的外觀,因為它們的變化和移動速度超過了眼睛可以檢測到的速度。這種視覺錯覺發生是因為人類視神經以每秒十次的頻率響應光線變化,因此任何快於此速率的變化都將被記錄為連續運動,而不是作為單獨的影像。
二階運動是指當移動輪廓由對比度、紋理、閃爍或其他不會導致影像亮度或運動能量增加的質量定義時發生的運動。證據表明,一階運動和二階運動的早期處理是由不同的通路進行的。二階機制具有較差的時間解析度,並且在它們響應的空間頻率範圍內是低通的。二階運動會產生較弱的運動後效。一階和二階訊號在V5區中被組合。
在本章中,我們將分析運動知覺和運動分析的概念,並解釋為什麼這兩個術語不應互換使用。我們將分析感知運動的機制,例如運動感測器和特徵跟蹤。存在三種主要的理論模型試圖描述運動神經元感測器的功能。已經進行了實驗測試以確認這些模型是否準確。不幸的是,這些測試的結果是不確定的,可以說這些模型中沒有一個完全描述了運動感測器的功能。但是,這些模型中的每一個都模擬了運動感測器的某些特徵。描述了這些感測器的某些特性。最後,本章展示了一些運動錯覺,這些錯覺表明我們的運動感可能會被靜態外部因素所誤導,這些因素以與運動相同的方式刺激運動感測器。
運動分析和運動知覺的概念經常被混淆為可互換的。運動知覺和運動分析彼此重要,但它們並不相同。
運動分析是指處理運動訊號的機制。與運動知覺不一定依賴於視網膜影像運動產生的訊號類似,運動分析可能導致也可能不導致運動知覺。這種現象的一個例子是vection,當一個人感知到自己在移動時,而她實際上是靜止的,但她觀察到的物體在移動。vection表明可以分析物體的運動,即使它不被感知為來自物體的運動。運動分析的這種定義表明運動是影像的基本屬性。在視野中,它在每個點都被分析。分析的結果用於推匯出感知資訊。
運動知覺是指獲取有關影像中物體和表面運動的感知知識的過程。運動是透過視網膜中精細的區域性感測器或透過特徵跟蹤來感知的。區域性運動感測器是專門對運動敏感的神經元,類似於專門的顏色感測器。特徵跟蹤是一種間接感知運動的方式,它包括根據物體隨時間推移在視網膜位置的變化來推斷運動。它也被稱為三階運動分析。特徵跟蹤透過將注意力集中到特定物體並觀察其位置隨時間推移如何變化來工作。
運動檢測是視覺處理的第一階段,它得益於專門的神經過程,這些過程響應有關影像強度隨時間區域性變化的資訊。運動在影像的所有位置獨立於其他影像屬性進行感知。已經證明運動感測器存在,並且它們在影像的所有點上都在區域性執行。運動感測器是位於視網膜中的專用神經元感測器,能夠檢測由兩個短暫且微弱的光閃所產生的運動,這兩個光閃如此接近以至於特徵跟蹤無法檢測到。存在三種主要的模型試圖描述這些專門的感測器的工作方式。這些模型彼此獨立,並且試圖模擬運動知覺的特定特徵。儘管沒有足夠的證據支援任何這些模型代表視覺系統(特別是運動感測器)感知運動的方式,但它們仍然正確地模擬了這些感測器的某些功能。

Reichardt檢測器
萊卡特探測器用於模擬運動感測器如何響應一階運動訊號。當物體從視覺區域的A點移動到B點時,會產生兩個訊號:一個在運動開始前,另一個在運動完成後。該模型透過檢測視網膜上一點的亮度變化,並將其與短時間延遲後附近另一點的亮度變化相關聯來感知這種運動。萊卡特探測器基於相關性(涉及依賴性的統計關係)的原理進行操作。它透過相鄰點的亮度訊號的時空相關性來解釋運動訊號。它利用了這樣一個事實:移動物體軌跡上不同點的兩個感受野接收到的同一訊號的時間偏移版本——亮度模式沿軸移動,軸上某一點的訊號是軸上先前訊號的時間偏移版本。萊卡特探測器模型有兩個空間上分離的相鄰探測器。探測器的輸出訊號以如下方式相乘(相關):一個訊號乘以另一個訊號,該訊號是原始訊號的時間偏移版本。重複相同的過程,但運動方向相反(時間偏移的訊號成為第一個訊號,反之亦然)。然後,取這兩個乘法的差值,結果給出運動速度。探測器的響應取決於刺激的相位、對比度和速度。需要許多以不同速度調整的探測器來編碼圖案的真實速度。這種探測器最有說服力的實驗證據來自對幾乎不可見的靶標的方向辨別研究。
運動能量濾波
運動能量濾波器是一種基於相位不變濾波器原理的運動感測器模型。該模型構建了在時空定向的空間-時間濾波器,以匹配移動圖案的結構。它由可分離濾波器組成,其中空間輪廓在時間上保持相同的形狀,但按時間濾波器的值縮放。運動能量濾波器透過將可分離濾波器加在一起來匹配移動圖案的結構。對於每個運動方向,生成兩個時空濾波器:一個是對稱的(條狀),另一個是非對稱的(邊緣狀)。這些濾波器的平方和稱為運動能量。兩個方向訊號的差異稱為對抗能量。然後將此結果除以另一個濾波器的平方輸出,該濾波器調整為靜態對比度。執行此除法是為了考慮對比度對運動的影響。運動能量濾波器可以模擬許多運動現象,但它產生了一個與相位無關的測量值,該測量值隨速度增加,但不能提供可靠的速度值。
時空梯度

這種運動感測器模型最初是在計算機視覺領域開發的,它基於這樣一個原理:影像亮度的時域導數與影像亮度的空域導數之比給出了運動速度。需要注意的是,在影像的峰值和谷值處,該模型將無法計算出足夠的答案,因為分母中的導數將為零。為了解決這個問題,還可以分析關於空間和時間的二階及更高階空間導數。時空梯度是確定影像中所有點運動速度的一個很好的模型。
運動感測器的特性之一是方向選擇性,它將運動分析限制在一個維度上。運動感測器只能記錄沿垂直於感測器首選方向的軸線的一個維度上的運動。包含單個方向特徵的刺激只能看到沿垂直於刺激方向的方向移動。一維運動訊號關於二維物體的運動提供了模稜兩可的資訊。為了確定二維物體或圖案的真實運動方向,需要進行第二階段的運動分析。來自調整到不同方向的感測器的 1D 運動訊號組合在一起以產生明確的 2D 運動訊號。二維運動分析取決於來自區域性寬方向感測器以及來自窄方向感測器的訊號。
我們感知運動的另一種方式是透過特徵跟蹤。特徵跟蹤包括分析物體的區域性特徵是否改變了位置,並根據此變化推斷運動。在本節中,提到了關於特徵跟蹤器的一些特徵。
當移動刺激非常快速地發生時,特徵跟蹤器會失效。與運動感測器相比,特徵跟蹤器具有優勢,即使運動被間歇性的空白間隔隔開,它們也能感知物體的運動。它們還可以分離這兩個階段(運動和空白間隔)。另一方面,運動感測器只會將空白與移動刺激整合在一起,並看到連續的運動。特徵跟蹤器根據識別特徵的位置進行操作。因此,它們具有一個最小距離閾值,該閾值與可以區分特徵位置的精度相匹配。特徵跟蹤器不會顯示運動後效應,運動後效應是由視覺適應引起的視覺錯覺。當觀察到移動刺激後,靜止物體似乎沿先前觀察到的移動刺激的反方向移動時,就會發生運動後效應。這種機制不可能同時監控視覺區域不同部分的多個運動。另一方面,對於運動感測器來說,多個運動不是問題,因為它們在整個視覺區域內並行操作。
已經使用上述資訊進行了實驗,以得出關於特徵跟蹤器的有趣結論。對簡短刺激的實驗表明,特徵跟蹤器無法感知高對比度的顏色圖案和對比度圖案,但運動感測器可以感知。對空白間隔的實驗證實,特徵跟蹤可以在顯示屏中出現空白間隔的情況下發生。只有在高對比度下,運動感測器才能感知色度刺激和對比度圖案的運動。在低對比度下,特徵跟蹤器分析色度圖案和對比度包絡的運動,而在高對比度下,運動感測器分析對比度包絡。在受試者進行多個運動判斷的實驗中表明,特徵跟蹤是在意識控制下進行的過程,並且是我們分析低對比度顯示屏中對比度包絡運動的唯一方法。這些結果與以下觀點一致:對比度包絡和顏色圖案的運動取決於特徵跟蹤,除非顏色遠高於閾值或平均對比度很高。這些實驗的主要結論是,可能是特徵跟蹤使得能夠感知對比度包絡和顏色圖案。
由於運動檢測過程的工作方式,一些靜態影像可能會讓我們看起來像在移動。這些影像讓我們瞭解了視覺系統所做的假設,被稱為視覺錯覺。
與一階運動訊號相關的著名運動錯覺是phi現象,這是一種光學錯覺,使我們感知運動而不是影像序列。這種運動錯覺使我們能夠將電影看作連續體,而不是單獨的影像。phi現象允許以恆定速度變化的一組凍結影像被視為恆定的運動。phi現象不應與β運動混淆,因為前者是由一系列發光脈衝引起的表觀運動,而後者是由發光靜止脈衝引起的表觀運動。
當運動感知、運動分析以及這些訊號的解釋具有誤導性時,就會發生運動錯覺,我們的視覺系統會產生關於運動的錯覺。這些錯覺可以根據允許它們發生的程序進行分類。錯覺被歸類為與運動感測、二維整合和三維解釋相關的錯覺。
關於運動感測最流行的錯覺是四衝程運動、RDK和二階運動訊號錯覺。關於二維整合最流行的運動錯覺是運動捕捉、格子運動和直接排斥。類似地,關於三維解釋的錯覺是變換運動、運動深度、陰影運動、生物運動、立體運動、隱式圖形運動和雙衝程運動。還有更多運動錯覺,它們都展示了關於人類運動檢測、感知和分析機制的一些有趣的東西。有關更多資訊,請訪問以下連結:http://www.lifesci.sussex.ac.uk/home/George_Mather/Motion/
儘管我們對運動感知的大多數細節仍然缺乏瞭解,但理解運動感知的機制以及運動錯覺可以使讀者對該主題的最新研究狀況有一個很好的概述。關於運動感知的一些未解決的問題包括全域性運動中 3D 影像的形成機制和 *孔徑問題*。
來自視網膜的全域性運動訊號被整合以形成二維全域性運動訊號;然而,3D 全域性運動是如何形成的尚不清楚。孔徑問題之所以出現,是因為視覺系統中的每個感受野只覆蓋視覺世界的一小部分,這導致感知上的模糊性。孔徑問題指的是移動輪廓在區域性觀察時與不同的運動可能性一致的問題。這種模糊性源於幾何學 - 無法檢測到平行於輪廓的運動,因為這種運動分量的變化不會改變透過孔徑觀察到的影像。唯一可以測量的分量是垂直於輪廓方向的速度;因此,運動的速度可以是速度空間中一條線上任何運動的組合。這種孔徑問題不僅在直線輪廓中觀察到,而且在平滑彎曲的輪廓中也觀察到,因為它們在區域性觀察時近似於直線。雖然解決孔徑問題的機制仍然未知,但存在一些關於如何解決它的假設。例如,可以透過組合來自空間或同一物體不同輪廓的資訊來解決這個問題。
在本節中,我們介紹了運動感知以及我們的視覺系統檢測運動的機制。運動錯覺展示了運動訊號如何具有誤導性,並因此導致對運動的錯誤結論。重要的是要記住,運動感知和運動分析並不相同。運動感測器和特徵跟蹤器相互補充,使視覺系統感知運動。
運動感知很複雜,它仍然是一個開放的研究領域。本章描述了關於運動感測器功能的模型,以及關於特徵跟蹤器特徵的假設;然而,需要更多的實驗來了解這些機制的特徵,並能夠構建更準確地模擬視覺系統實際過程的模型。
本章中描述的各種運動分析和運動感知機制,以及為描述它們而設計的複雜人工模型表明,大腦皮層處理外部環境訊號的方式非常複雜。數千個專門的神經元整合和解釋區域性訊號片段,在大腦中形成移動物體的全域性影像。理解我們的身體中有如此多的參與者和過程必須協同工作才能感知運動,這使得我們人類能夠如此輕鬆地做到這一點,這一點更加令人驚奇。
人類(以及猴子和猩猩等靈長類動物)在哺乳動物中擁有最好的顏色感知能力[1]。因此,顏色在廣泛的方面發揮重要作用並非巧合。例如,顏色可用於區分和識別物體、表面、自然景觀,甚至面部[2],[3]。顏色也是非語言交流的重要工具,包括情感的表達[4]。
幾十年來,找到顏色物理特性與其感知特性之間聯絡一直是一個挑戰。通常,這些是在兩種不同的方法下進行研究的:顏色引起的行為反應(也稱為 *心理物理學*)以及它引起的實際生理反應[5]。
這裡我們只關注後者。顏色視覺生理基礎的研究,在二十世紀下半葉之前幾乎一無所知,自 1950 年以來穩步發展。在許多領域取得了重要進展,尤其是在受體水平。多虧了分子生物學方法,才有可能揭示先前未知的有關視錐色素遺傳基礎的細節。此外,越來越多的皮層區域被證明受到視覺刺激的影響,儘管顏色感知與波長相關的生理活動(超出受體)的相關性並不那麼容易辨別[6]。
在本節中,我們的目標是解釋顏色感知沿視覺通路不同過程的基礎,從眼睛的視網膜到大腦的視覺皮層。有關解剖學細節,請參閱本華夏公益教科書“視覺系統的解剖結構”部分。
人類可以區分的所有顏色都可以透過僅僅三種原色(基本顏色)的混合產生。受這種顏色混合思想的啟發,有人提出顏色是由三類感測器支援的,每類感測器對可見光譜的不同部分具有最大的敏感性[1]。1853 年首次明確提出,正常顏色匹配存在三個自由度[7]。這後來在 1886 年得到證實[8](結果與最近的研究非常接近[9],[10])。
這些提議的顏色感測器實際上就是所謂的視錐細胞(注意:在本節中,我們只處理視錐細胞。視杆細胞僅在低光照條件下對視覺有貢獻。儘管已知它們對顏色感知有影響,但其影響非常小,可以忽略不計。)[11]。視錐細胞是視網膜中發現的兩種感光細胞型別之一,其中視錐細胞在中央凹處大量集中。下表列出了三種類型的視錐細胞。這些透過不同型別的視紫紅質色素來區分。它們相應的吸收曲線顯示在下圖中。
| 名稱 | 對顏色的較高敏感性 | 吸收曲線峰值 [nm] |
|---|---|---|
| S、SWS、B | 藍色 | 420 |
| M、MWS、G | 綠色 | 530 |
| L、LWS、R | 紅色 | 560 |
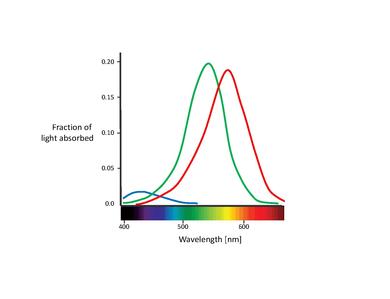
雖然尚未就不同視錐細胞型別的命名達成共識,但最廣泛使用的名稱要麼指其光譜作用峰值,要麼指它們本身敏感的顏色(紅色、綠色、藍色)[6]。在本文字中,我們將使用 S-M-L 名稱(分別代表短波長、中波長和長波長),因為這些名稱更具描述性。藍綠紅命名法有些誤導,因為所有型別的視錐細胞都對較大範圍的波長敏感。
三種視錐細胞的一個重要特徵是它們在視網膜上的相對分佈。事實證明,S 視錐細胞在整個視網膜中的濃度相對較低,在中央凹的最中心區域完全不存在。實際上,它們的間距太寬,無法在空間視覺中發揮重要作用,儘管它們能夠介導弱邊界感知[12]。中央凹主要由 L 視錐細胞和 M 視錐細胞支配。後兩種視錐細胞的比例通常以比率來衡量。L/M 比率的報道值各不相同,從 0.67[13]到 2[14]不等,後者是最被接受的。為什麼 L 視錐細胞幾乎總是多於 M 視錐細胞仍然不清楚。令人驚訝的是,相對視錐細胞比率對顏色視覺幾乎沒有顯著影響。這清楚地表明大腦具有可塑性,能夠理解它接收到的任何視錐細胞訊號[15],[16]。
同樣重要的是要注意 L 視錐細胞和 M 視錐細胞吸收光譜的重疊。雖然 S 視錐細胞吸收光譜是明顯分開的,但 L 視錐細胞和 M 視錐細胞的峰值僅相隔約 30 奈米,其光譜曲線也存在顯著重疊。這導致這兩種視錐細胞類別的光子捕獲高度相關。這是因為為了在中央凹中心獲得儘可能高的視敏度,視覺系統平等地對待 L 視錐細胞和 M 視錐細胞,而沒有考慮它們的光譜吸收。因此,任何型別的差異都會導致亮度訊號下降[17]。換句話說,L 視錐細胞和 M 視錐細胞光譜之間的微小分離可以解釋為高對比度顏色視覺和高敏度亮度視覺需求之間的折衷。這與中央凹中心部分缺乏 S 視錐細胞相一致,在該區域視敏度最高。此外,L 視錐細胞和 M 視錐細胞吸收光譜的緊密間距也可以用它們的遺傳起源來解釋。這兩種視錐細胞型別被認為是從一個共同祖先進化而來(大約 3500 萬年前),而 S 視錐細胞可能在更早的時候從祖先受體分離出來[11]。
三種不同型別視錐細胞的光譜吸收函式是人類顏色視覺的標誌。該理論解決了一個長期存在的問題:儘管我們可以看到數百萬種不同的顏色(人類可以區分 700 萬到 1000 萬種不同的顏色[5]),但我們的視網膜根本沒有足夠的空間來容納每個顏色在每個視網膜位置的單個檢測器。
從視網膜傳遞到更高層次的訊號不是受體訊號的簡單逐點表示,而是受體訊號的複雜組合。本節的目的是簡要介紹其中一些資訊所走的路徑。
一旦視網膜上的光學影像被轉換為感光細胞中的化學和電訊號,幅度調製訊號就會在神經節細胞和更高層次轉換為頻率調製表示。在這些神經細胞中,訊號的大小用細胞每秒發出的電壓尖峰數來表示,而不是用細胞膜上的電壓差來表示。為了解釋和表示這些細胞的生理特性,我們會發現感受野的概念非常有用。
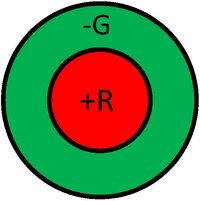
感受野是視覺場中給定細胞響應區域的圖形表示。此外,通常會為感受野中的各個區域指示響應的性質。例如,我們可以將感光細胞的感受野視為一個小圓形區域,表示該特定受體在視覺場中的敏感度大小和位置。下圖顯示了神經節細胞的示例感受野,通常表現為中心-周圍拮抗。圖中左側的感受野說明了正中心響應(稱為中心啟用)。這種型別的響應通常是由單個視錐細胞的正輸入產生的,周圍是幾個相鄰視錐細胞產生的負響應。因此,該神經節細胞的響應將由具有正負號的各種視錐細胞的輸入組成。透過這種方式,細胞不僅對光點做出反應,而且充當邊緣(或更準確地說,斑點)檢測器。類似於計算機視覺術語,我們可以將神經節細胞響應視為與邊緣檢測核心進行卷積的輸出。圖中右側的感受野說明了負中心響應(稱為中心抑制),這同樣可能。通常,中心啟用和中心抑制細胞將出現在相同空間位置,由相同的感光細胞供給,從而導致動態範圍增強。
下圖顯示,除了空間拮抗之外,神經節細胞還可以具有光譜對抗。例如,下圖左側說明了紅綠對抗響應,中心由 L 視錐細胞的正輸入供給,周圍由 M 視錐細胞的負輸入供給。另一方面,下圖右側說明了該細胞的中心抑制版本。因此,在視覺資訊甚至離開視網膜之前,處理就已經發生了,這對顏色外觀產生了深遠的影響。還有其他型別和種類的神經節細胞響應,但它們都共享這些基本概念。



在通往初級視覺皮層途中,神經節細胞軸突聚集形成視神經,投射到丘腦的背側外側膝狀體核(LGN)。視神經中的編碼效率很高,將神經纖維的數量降到最低(受視神經大小的限制),從而也使視網膜盲點的尺寸儘可能小(大約 5° 寬,7° 高)。此外,對於均勻照明,所呈現的神經節細胞將沒有響應,因為正負區域是平衡的。換句話說,傳輸的訊號是不相關的。例如,自然場景中相鄰部分的資訊在空間上高度相關,因此高度可預測[18]。相鄰視網膜神經節細胞之間的側抑制最大限度地減少了這種空間相關性,從而提高了效率。我們可以將其視為在視網膜上執行的影像壓縮過程。
鑑於 L 視錐細胞和 M 視錐細胞吸收光譜的重疊,它們的訊號也高度相關。在這種情況下,透過組合視錐細胞訊號來最大限度地減少所述相關性,從而提高編碼效率。我們可以使用主成分分析 (PCA) 更容易地理解這一點。PCA 是一種統計方法,用於透過將原始變數轉換為一組新的變數(主成分 (PC))來降低給定變數集的維數。第一個 PC 佔原始變數中最大量的總方差,第二個 PC 佔第一個成分未解釋的最大量的方差,依此類推。此外,PC 在引數空間中是線性無關且正交的。PCA 的主要優點是隻需要少數幾個最強的 PC 就能覆蓋系統的大部分可變性[19]。該方案已用於視錐細胞吸收函式[20],甚至用於自然發生的光譜[21],[22]。在自然物體產生的視錐細胞激發空間中發現的 PC 是 1) 亮度軸,其中 L 視錐細胞和 M 視錐細胞訊號相加 (L+M),2) L 視錐細胞和 M 視錐細胞訊號的差 (L-M),以及 3) 色彩軸,其中 S 視錐細胞訊號與 L 視錐細胞和 M 視錐細胞訊號之和的差 (S-(L+M))。這些從數學/計算方法匯出的通道與在電生理實驗中發現的三個視網膜-膝狀體通道一致[23],[24]。使用這些機制,視覺冗餘資訊在視網膜中被消除。
實際上,有三個資訊通道將此資訊從視網膜透過神經節細胞傳遞到 LGN。它們不僅在色度特性上有所不同,而且在解剖結構上也存在差異。這些通道對基本顏色任務(如檢測和辨別)構成重要限制。
在第一個通道中,L 視錐細胞和 M 視錐細胞的輸出協同傳遞到瀰漫性雙極細胞,然後傳遞到 LGN 的大細胞層 (M-) 中的細胞(不要與視網膜的 M 視錐細胞混淆)[24]。M 細胞的感受野由中心和周圍組成,它們在空間上是拮抗的。M 細胞對亮度刺激具有高對比度敏感性,但在 L-M 對抗輸入的某些組合下沒有反應[25]。但是,由於不同 M 細胞的零點略有不同,因此總體響應永遠不會真正為零。該特性實際上被傳遞到以 M 細胞輸入為主的皮層區域[26]。
視網膜小細胞通路(P-)起源於L或M錐體細胞到微型雙極細胞的單個輸出。這些為視網膜P細胞提供輸入[11]。在中央凹,P細胞的感受野中心由單個L或M錐體細胞形成。P細胞感受野周圍的結構仍在爭論中。然而,最被接受的理論認為,周圍是由特定型別的錐體細胞構成,從而產生針對亮度刺激的空間對立感受野[27]。小細胞層貢獻了大約80%的從視網膜到外側膝狀體的總投射[28]。
最後,最近發現的中間細胞通路(K-)主要攜帶來自S錐體細胞的訊號[29]。這類錐體細胞的群體投射到特殊的雙極細胞,而這些雙極細胞又為特定的小的神經節細胞提供輸入。這些神經節細胞通常不是空間對立的。小的神經節細胞的軸突投射到外側膝狀體的薄層(鄰近小細胞層)[30]。
雖然神經節細胞確實終止於外側膝狀體(與外側膝狀體細胞形成突觸),但神經節細胞和外側膝狀體細胞之間似乎存在一一對應關係。外側膝狀體似乎充當訊號的中繼站。然而,它可能具有一些視覺功能,因為存在從皮層返回到外側膝狀體的突觸,這可能作為某種型別的切換或適應反饋機制。外側膝狀體細胞的軸突投射到枕葉視覺皮層中的視覺區域一(V1)。
大腦中的顏色感知
[edit | edit source]在皮層中,來自大細胞、小細胞和中間細胞通路的投射終止於初級視覺皮層的不同層。大細胞纖維主要支配4Cα層和6層。小細胞神經元主要投射到4Cβ層以及4A層和6層。中間細胞神經元終止於1、2和3層中富含細胞色素氧化酶(CO-)的斑點[31]。
一旦進入視覺皮層,視覺資訊的編碼變得更加複雜。以相同的方式,各種光感受器的輸出被組合和比較以產生神經節細胞反應,各種外側膝狀體細胞的輸出被比較和組合以產生皮層反應。隨著訊號在皮層處理鏈中進一步向上推進,這個過程會重複,複雜程度迅速增加,以至於感受野開始失去意義。然而,一些功能和過程已在視覺皮層的特定區域得到識別和研究。
在V1區域(紋狀皮層),雙對立神經元——神經元在其感受野中關於單個感受野的開/關區域在色度和空間上都相反——比較跨越視覺空間的顏色訊號[32]。它們佔V1細胞的5%到10%。它們的大小粗糙,比例小,這與顏色視覺的空間解析度差相匹配[1]。此外,它們對運動刺激的方向不敏感(與其他一些V1神經元不同),因此不太可能參與運動感知[33]。然而,鑑於它們專門的感受野結構,這類細胞是顏色對比效應的神經基礎,也是編碼顏色本身的有效手段[34],[35]。其他V1細胞對其他型別的刺激做出反應,例如定向邊緣、各種空間和時間頻率、特定的空間位置以及這些特徵的組合等等。此外,我們可以找到線性組合來自外側膝狀體細胞的輸入的細胞,以及執行非線性組合的細胞。這些反應是支援高階視覺能力(例如顏色本身)所必需的。

與V1相比,關於V2中單個神經元的色度特性的資訊要少得多。乍一看,V1和V2的顏色編碼似乎沒有主要區別[36]。一個例外是出現了一類新的顏色複雜細胞[37]。因此,有人認為V2區域參與了色調的細化。然而,這仍然存在很大爭議,尚未得到證實。
遵循在發現V1中的功能性眼優勢後發展起來的模組化概念,並考慮到P-、M-和K-通路之間的解剖學分離(在第3節中描述),有人建議視覺皮層中應該存在一個專門用於分析顏色資訊的系統[38]。V4是歷史上最受關注的可能的大腦“顏色區域”。這是因為一項有影響力的研究聲稱V4包含100%的色調選擇性細胞[39]。然而,這一說法已被許多後續研究質疑,一些研究甚至報告說只有16%的V4神經元顯示色調調整[40]。目前,最被接受的概念是,V4不僅有助於顏色,還有助於形狀感知、視覺注意和立體視覺。此外,最近的研究集中在其他大腦區域,試圖找到大腦的“顏色區域”,例如TEO[41]和PITd[42]。這些區域彼此之間的關係仍在爭論中。為了調和討論,一些人使用術語後下顳葉(PIT)皮層來表示包含V4、TEO和PITd的區域[1]。
如果V1、V2和V4細胞中的皮層反應已經是一項非常複雜的任務,那麼在近30個視覺區域網路中複雜視覺反應的複雜程度是巨大的。圖4顯示了已識別出的不同皮層區域(而不是細胞)連線性的一小部分[43]。
在這個階段,用簡單的術語解釋單個皮層細胞的功能變得異常困難。事實上,單個細胞的功能可能沒有意義,因為各種感知的表徵必須分佈在整個皮層中的細胞集合中。
顏色視覺適應機制
[edit | edit source]儘管研究人員一直在試圖解釋人類視覺系統中顏色訊號的處理過程,但重要的是要了解顏色感知不是一個固定的過程。實際上,存在各種動態機制,用於根據觀看環境最佳化視覺反應。與顏色感知特別相關的是暗適應、亮適應和色適應機制。
暗適應
[edit | edit source]暗適應是指當照明水平降低時發生的視覺靈敏度變化。視覺系統對光照減少的反應是變得更加敏感,從而提高其產生有意義的視覺反應的能力,即使在光照條件不佳的情況下[44]。
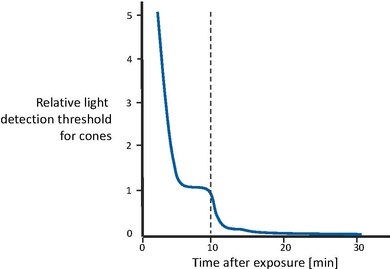
圖 5 顯示了從極高亮度水平過渡到完全黑暗後視覺靈敏度的恢復[43]。首先,錐體細胞逐漸變得更加敏感,直到曲線在幾分鐘後趨於平緩。然後,大約 10 分鐘後,視覺靈敏度大致保持恆定。此時,具有較長恢復時間的杆體細胞已經恢復了足夠的靈敏度,從而超過錐體細胞,並因此重新控制整體靈敏度。杆體細胞的靈敏度也逐漸提高,直到在大約 30 分鐘後變得漸近。換句話說,錐體細胞負責前 10 分鐘的靈敏度恢復。之後,杆體細胞超過錐體細胞,並在大約 30 分鐘後獲得完全的靈敏度。
這只是為了儘可能好地適應黑暗照明條件而產生的幾種神經機制之一。一些其他的神經機制包括眾所周知的瞳孔反射、光色素的消耗和再生、視網膜細胞的增益控制以及其他高階機制和認知解釋等。
光適應本質上是暗適應的逆過程。事實上,這兩個過程的潛在生理機制是相同的。但是,由於其視覺特性不同,因此必須單獨考慮它。

當照明水平增加時發生光適應。因此,鑑於有大量可見光可用,視覺系統必須變得不那麼敏感,才能產生有用的感知。視覺系統用於產生我們感知的訊號具有有限的輸出動態範圍。然而,現實世界中的照明水平至少覆蓋了 10 個數量級。幸運的是,我們很少需要同時檢視整個照明範圍。
在高光照水平下,適應是透過光色素漂白來實現的。這可以調整感受器中的光子捕獲,並保護錐體細胞響應在明亮背景下不飽和。光適應的機制主要發生在視網膜內[45]。事實上,增益變化在很大程度上是錐體細胞特異性的,並且適應訊號在不超過單個錐體細胞直徑的區域內進行池化[46],[47]。這表明光適應的定位可能早在感受器階段就開始了。但是,似乎存在不止一個靈敏度縮放位點。一些增益變化非常快,而另一些則需要幾秒甚至幾分鐘才能穩定[48]。通常,光適應大約需要 5 分鐘(比暗適應快六倍)。這可能表明了感受器後位點的影響。
圖 6 顯示了光適應的示例[43]。如果我們使用單個響應函式將大範圍的強度對映到視覺系統的輸出,那麼對於給定場景,我們只有很小的範圍可用。很明顯,使用這樣的響應函式,任何給定場景的感知對比度將受到限制,並且由於信噪比問題,視覺對變化的靈敏度將嚴重下降。這種情況由虛線表示。另一方面,實線表示視覺響應的系列。這些曲線將任何給定場景中有用的照明範圍對映到視覺輸出的完整動態範圍,從而為每種情況提供最佳的視覺感知。光適應可以被認為是沿照明水平軸滑動視覺響應曲線,直到達到給定觀看條件下的最佳水平的過程。
色適應的一般概念在於三種錐體細胞光譜響應曲線高度的變化。這種調整的出現是因為光適應在每種錐體細胞型別中獨立發生。這種假設的一個具體表述被稱為馮·克里斯適應。該假設指出,適應響應發生在三種錐體細胞型別中的每一種,並且等同於將其固定的光譜靈敏度乘以一個縮放常數[49]。如果縮放權重(也稱為馮·克里斯係數)與每種錐體細胞型別對光的吸收成反比(即,較低的吸收需要較大的係數),那麼馮·克里斯縮放將保持每種錐體細胞類別的平均響應恆定。這提供了一種簡單而強大的機制,用於保持物體在照明變化時的感知顏色。在多種不同的條件下,馮·克里斯縮放很好地解釋了光適應對顏色靈敏度和外觀的影響[50],[51]。
理解色適應最簡單的方法是檢查不同型別照明下的白色物體。例如,讓我們考慮在日光、熒光燈和白熾燈照明下檢查一張紙。日光包含的短波能量比熒光燈多得多,而白熾燈包含的長波能量比熒光燈多得多。但是,儘管照明條件不同,但紙張在所有三種光源下都大致保持其白色外觀。這是因為 S 錐體細胞在日光下變得相對不那麼敏感(為了補償額外的短波能量),而 L 錐體細胞在白熾燈照明下變得相對不那麼敏感(為了補償額外的長波能量)[43]。
- ↑ a b c d Conway, Bevil R (2009). "顏色視覺、錐體細胞和皮層中的顏色編碼". 神經科學家. 15: 274–290.
- ↑ Russell, Richard 和 Sinha, Pawan} (2007). "現實世界的人臉識別:表面反射特性的重要性". 感知. 36 (9).
{{cite journal}}:CS1維護:作者列表有多個名稱(link) - ↑ Gegenfurtner, Karl R 和 Rieger, Jochem (2000). "顏色對自然場景識別的感官和認知貢獻". 當代生物學. 10 (13): 805–808.
{{cite journal}}:CS1維護:作者列表有多個名稱(link) - ↑ Changizi, Mark A、Zhang, Qiong 和 Shimojo, Shinsuke (2006). "裸露的皮膚、血液和靈長類動物顏色視覺的進化". 生物學快報. 2 (2): 217–221.
{{cite journal}}:CS1維護:作者列表有多個名稱(link) - ↑ a b Beretta, Giordano (2000). 理解顏色. 惠普公司.
- ↑ a b Boynton, Robert M (1988). “顏色視覺”. 心理學年鑑. 39 (1): 69–100.
- ↑ Grassmann, Hermann (1853). “論顏色混合理論”. 物理年鑑. 165 (5): 69–84.
- ↑ Konig, Arthur 和 Dieterici, Conrad (1886). “基本感覺及其在光譜中的強度分佈”. 普魯士皇家科學院院刊.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Smith, Vivianne C 和 Pokorny, Joel (1975). “400至500奈米之間中央凹錐體感光色素的光譜敏感性”. 視覺研究. 15 (2): 161–171.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Vos, JJ 和 Walraven, PL (1971). “關於中央凹感受器原色的推導”. 視覺研究. 11 (8): 799–818.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ a b c Gegenfurtner, Karl R 和 Kiper, Daniel C (2003). “顏色視覺”. 神經科學. 26 (1): 181.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Kaiser, Peter K 和 Boynton, Robert M (1985). “藍色機制在波長辨別中的作用”. 視覺研究. 125 (4): 523–529.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Paulus, Walter 和 Kroger-Paulus, Angelika (1983). “視網膜顏色編碼的新概念”. 視覺研究. 23 (5): 529–540.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Nerger, Janice L 和 Cicerone, Carol M (1992). “人眼旁中央凹視網膜中L錐體與M錐體的比例”. 視覺研究. 32 (5): 879–888.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Neitz, Jay, Carroll, Joseph, Yamauchi, Yasuki, Neitz, Maureen 和 Williams, David R (2002). “顏色感知是由一種可調節的成人可塑神經機制介導的”. 神經元. 35 (4): 783–792.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Jacobs, Gerald H, Williams, Gary A, Cahill, Hugh 和 Nathans, Jeremy (2007). “表達人類錐體感光色素的小鼠中新型顏色視覺的出現”. 科學. 315 (5819): 1723–1725.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Osorio, D, Ruderman, DL 和 Cronin, TW (1998). “靈長類動物視網膜編碼的亮度訊號中由紅綠錐體取樣自然影像引起的誤差估計”. JOSA A. 15 (1): 16–22.
{{cite journal}}: CS1維護:多位作者:作者列表(連結) - ↑ Kersten, Daniel (1987). “自然影像的可預測性和冗餘性”. JOSA A. 4 (112): 2395–2400.
- ↑ Jolliffe, I. T. (2002). 主成分分析. 施普林格出版社.
- ↑ Buchsbaum, Gershon和Gottschalk, A (1983). “視網膜中的三色視覺、拮抗色編碼和最佳顏色資訊傳遞”. 倫敦皇家學會學報。B輯。生物科學. 220 (1218): 89–113.
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ Zaidi, Qasim (1997). “L和M錐體訊號的去相關”. JOSA A. 14 (12): 3430–3431.
- ↑ Ruderman, Daniel L,Cronin, Thomas W和Chiao, Chuan-Chin (1998). “錐體細胞對自然影像的響應統計:對視覺編碼的啟示”. JOSA A. 15 (8): 2036–2045.
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ Lee, BB,Martin, PR和Valberg, A (1998). “異色閃光光度法在獼猴視網膜神經節細胞中生理基礎的證明”. 生理學雜誌. 404 (1): 323–347.
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ a b Derrington, Andrew M,Krauskopf, John和Lennie, Peter (1984). “獼猴外側膝狀體核中的色覺機制”. 生理學雜誌. 357 (1): 241–265.
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ Shapley, Robert (1990). “視覺敏感性和視網膜皮層平行通路”. 心理學年度評論. 41 (1): 635--658.
- ↑ Dobkins, Karen R,Thiele, Alex和Albright, Thomas D (2000). “人類和獼猴紅綠等亮點的比較:不同物種之間L:M錐體比率的證據”. JOSA A. 17 (3): 545–556.
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ Martin, Paul R,Lee, Barry B,White, Andrew JR,Solomon, Samuel G和Ruttiger, Lukas (2001). “外周靈長類視網膜神經節細胞的色覺敏感性”. 自然. 410 (6831): 933–936.
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ Perry, VH,Oehler, R和Cowey, A (1984). “投射到獼猴背側外側膝狀體核的視網膜神經節細胞”. 神經科學. 12 (4): 1101--1123.
{{cite journal}}: 引用有空的未知引數:|month=(幫助)CS1維護:作者列表有多個名稱 (連結) - ↑ Casagrande, VA (1994). “通往靈長類動物V1區的第三條平行視覺通路”. 神經科學趨勢. 17 (7): 305–310.
- ↑ Hendry, Stewart HC和Reid, R Clay (2000). “靈長類視覺中的中間神經元通路”. 神經科學年度評論. 23 (1): 127–153.
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ Callaway, Edward M (1998). “獼猴初級視覺皮層的區域性迴路”. 神經科學年度評論. 21 (1): 47–74.
- ↑ Conway, Bevil R (2001). “清醒獼猴初級視覺皮層(V-1)中錐體細胞的錐體輸入的空間結構”. 神經科學雜誌. 21 (8): 2768–2783.
{{cite journal}}: 引用有空的未知引數:|month=(幫助) - ↑ Horwitz, Gregory D和Albright, Thomas D (2005). “獼猴V1區中彩色線性運動檢測器的稀缺性”. 視覺雜誌. 5 (6).
{{cite journal}}: CS1維護:作者列表有多個名稱 (連結) - ↑ Danilova, Marina V 和 Mollon, JD (2006). “空間分離顏色的比較”. 視覺研究. 46 (6): 823–836.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Wachtler, Thomas 和 Sejnowski, Terrence J 和 Albright, Thomas D (2003). “清醒獼猴初級視覺皮層中顏色刺激的表徵”. 神經元. 37 (4): 681–691.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Solomon, Samuel G 和 Lennie, Peter (2005). “視覺皮層神經元的色度增益控制”. 神經科學雜誌. 25 (19): 4779–4792.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Hubel, David H (1995). 眼、腦和視覺. Scientific American Library/Scientific American Books.
- ↑ Livingstone, Margaret S 和 Hubel, David H (1987). “感知形狀、顏色、運動和深度的獨立通道的心理物理學證據”. 神經科學雜誌. 7 (11): 3416–3468.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Zeki, Semir M (1973). “恆河猴前紋狀皮層中的顏色編碼”. 腦研究. 53 (2): 422–427.
- ↑ Conway, Bevil R 和 Tsao, Doris Y (2006). “透過 fMRI 揭示清醒獼猴皮層中的顏色結構”. 大腦皮層. 16 (11): 1604–1613.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Tootell, Roger BH 和 Nelissen, Koen 和 Vanduffel, Wim 和 Orban, Guy A (2004). “在獼猴視覺皮層中尋找顏色‘中心(s)’”. 大腦皮層. 14 (4): 353–363.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Conway, Bevil R 和 Moeller, Sebastian 和 Tsao, Doris Y (2007). “獼猴紋狀體外皮層中的專業顏色模組”. 560--573. 56 (3): 560–573.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ a b c d Fairchild, Mark D (2013). 顏色外觀模型. John Wiley & Sons.
- ↑ Webster, Michael A (1996). “人類顏色感知及其適應”. 網路:神經系統中的計算. 7 (4): 587–634.
- ↑ Shapley, Robert 和 Enroth-Cugell, Christina (1984). “視覺適應和視網膜增益控制”. 視網膜研究進展. 3: 263–346.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Chaparro, A 和 Stromeyer III, CF 和 Chen, G 和 Kronauer, RE (1995). “人類視錐細胞似乎在低光照水平下適應:對紅綠檢測機制的測量”. 視覺研究. 35 (22): 3103–3118.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Macleod, Donald IA 和 Williams, David R 和 Makous, Walter (1992). “由單個視錐細胞饋送的視覺非線性”. 視覺研究. 32 (2): 347–363.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Hayhoe, Mary (1991). 顏色和亮度中的適應機制. Springer.
- ↑ MacAdam, DAvid L (1970). 顏色科學的來源. 麻省理工學院出版社.
- ↑ Webster, Michael A 和 Mollon, JD (1995). “對比適應影響的顏色恆常性”. 自然. 373 (6516): 694–698.
{{cite journal}}: CS1 maint: 多個名稱:作者列表 (連結) - ↑ Brainard, David H 和 Wandell, Brian A (1992)。“非對稱顏色匹配:顏色外觀如何取決於光源”。JOSA A。9 (9): 1443–1448。
{{cite journal}}: CS1 維護:作者列表有多個名稱 (連結)